Paso 1: Esquema de junta archivos y lista de piezas
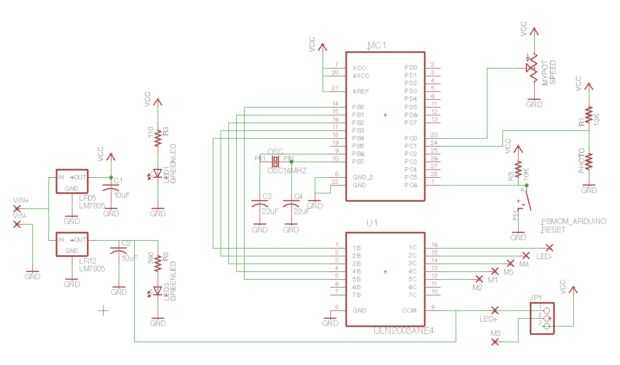
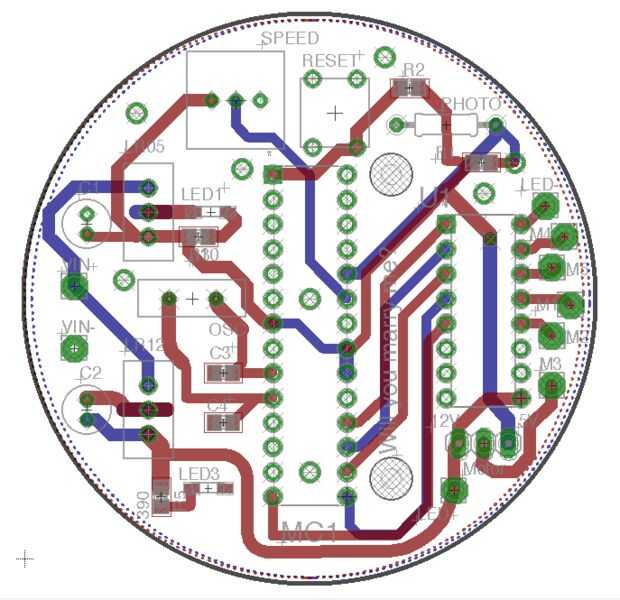
Abajo hay un enlace a los archivos esquemático, tablero de archivo y biblioteca.
https://www.Dropbox.com/SH/v8ka778xfl0t8s6/AADI6G8...
Editar (30/12/15): he actualizado el esquema y la junta con un jumper de 3 pines que permite la selección entre 5V y 12V para la tensión del motor. Esto también corrige un error en el archivo (M3 fue supuesto para ser conectado a 12V y LED + pero faltaba el segmento).
Yo he enumerado las partes en el siguiente enlace. El enlace de más abajo todas las piezas necesarias sumará a un carro en Digikey si está utilizando el mismo diseño exacto que utiliza. De lo contrario puede modificar esta lista. Añadí chips ATMEGA 328 con el Arduino. Si usted ya tiene estos chips puede eliminarlos de la lista. Necesita contactar con Digikey para asegurarse de que llegaron previamente programados con el Arduino Bootloader.
http://www.digikey.com/Short/tv9fbz
Lo único que no pude encontrar en Digikey eran los pulsadores que he usado. Aquí hay un enlace a la parte en la Amazonia.
http://www.Amazon.com/6x6x4-5mm-Momentary-Tactile-...
Código de Arduino (archivo .ino también en enlace de dropbox para esquema de)
¿/ * Se quieres casarte conmigo?
* Convierte un motor de pasos y luces LEDs cuando la fotocélula detecta la luz
* Escrito por David Steury
*/
#include //add Stepper.h soportes en ángulo alrededor de «Stepper.h"como instructables no permitirá que estas en un cuadro de texto, vea //Motor perilla debajo del archivo--ejemplos--paso a paso - mando de Motor para la clarificación adicional
crear una instancia de la clase paso a paso, especificando / / el número de pasos del motor y los pernos tiene / / atado al
#define 128 pasos / / cambiar el número de pasos en su motor
Paso a paso paso a paso (pasos, 8, 9, 10, 11); Escoja los pernos para el motor paso a paso
int ledstrip = 12;
void setup() {}
void loop() {/ / obtener el sensor valor int light=analogRead(A1); //Check si la caja está abierta
if(Light < 750) {//if caja está abierta
int val = analogRead(A0); Cheque por valor de pote (control de velocidad)
Val = map(val,0,1023,10,95); Asignar valor de pote al valor de la velocidad
stepper.setSpeed(val); Ajustar la velocidad del paso a paso a pot ajustado valor stepper.step(5); Paso 5 pasos antes de comprobar una vez más
digitalWrite(12,HIGH); Encender LEDs
}
Else {//If caja no está abierta
digitalWrite(8,LOW); Escribir pin 1 Motor a baja
digitalWrite(9,LOW); Escribir pin de Motor 2 a bajo
digitalWrite(10,LOW); Escribir pin 3 Motor a baja
digitalWrite(11,LOW); Escribir pin 4 Motor a baja
digitalWrite(12,LOW); Apagar el LED
}
}













