Paso 8: Conseguir que todos juntos
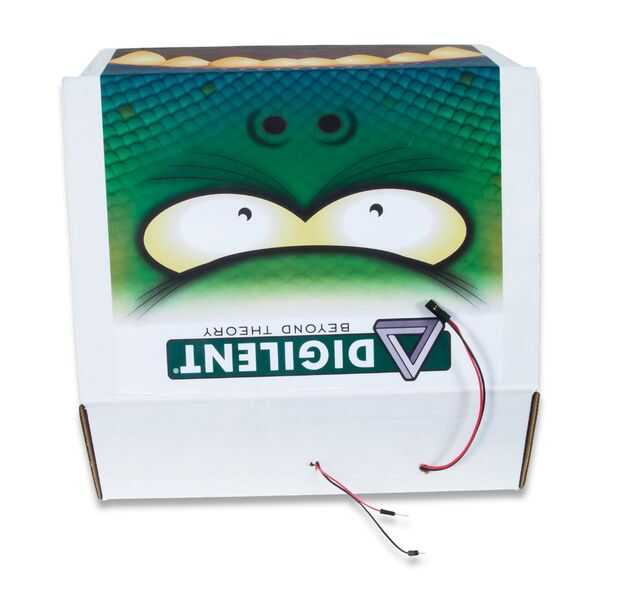
Ahora que ya tenemos listo el código, meter dos pequeños agujeros en la parte posterior del monstruo de la caja con el destornillador, una pluma o cualquier otra cosa que encontrará cómodo de usar, muy similar a los agujeros que ves en la imagen 1. Esto es por el par de cables de corriente y tierra procedentes de la placa chipKIT y soporte de la batería para que puedan ser fácilmente conectados y desconectados sin tener que acceder al interior de la boca del monstruo de la caja.
Ponga un clip de zUNO en el uC32 chipKIT y soporte de la batería. Puede ser un poco difícil conseguir el clip en el soporte de la batería, por lo que no es necesario para el soporte de la batería. Que desea en el tablero del microcontrolador pero para que si alguna vez desea sacar de la caja, no tendrá que preocuparse por conseguir cualquier pegamento de él.
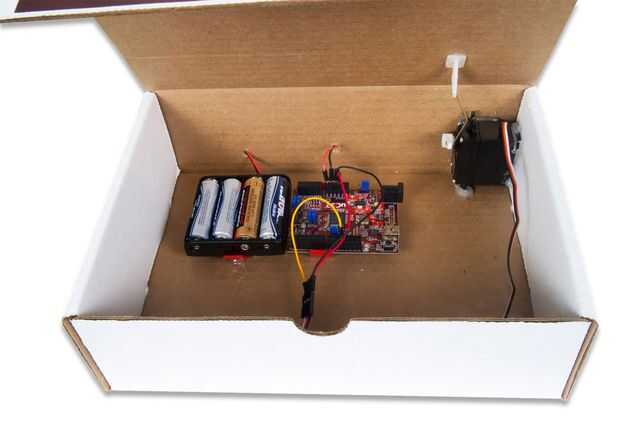
Una vez que los clips estén en su lugar, usa el pegamento caliente (pegamento regular, cinta, etc.) para garantizar el soporte de la batería en el lado izquierdo de la caja con el cable de 2 polos en la parte más cercana al orificio de la izquierda y segura chipKIT tablero a la derecha con las cabeceras de pin con la etiqueta "Power" y "Análogo" más cercano a la parte posterior de la caja.
Tomar uno de los cables de puente negro (o cualquier color, pero yo prefiero negro para fines de coordinación de color) y colocar a uno de los pines "Power" etiquetados como "GND" en el uC32; cada uno será un gran trabajo. Luego tomar un cable rojo (otra vez, para la coordinación de color) y enchúfelo en la clavija con la etiqueta "VIN" en la sección de "Poder" de la uC32. Ríen ambos de estos cables a través del orificio en la parte posterior de la caja y meter los dos cables de soporte de la batería a través del otro agujero en la parte posterior de la caja. Terminarás viendo algo muy parecido a la foto 2. Siempre que queremos recuperar nuestro monstruo de caja para arriba (suponiendo que tenemos las pilas en su lugar), conectaremos los cables rojo y negro juntos, respectivamente.
Para conectar el motor servo, conecte un cable de puente rojo entre el pin marcado "5V" en la sección de "Poder" y el cable rojo que sale del motor cinemático. Luego, conecte un cable de puente negro entre el otro pin marcado "GND" en la sección de "Power" y el cable negro del motor servo. Esto le dará la energía necesaria para nuestro motor. El cable blanco que sale del motor de servo es la línea de datos y debe estar conectado a pin digital 11 en el chipKIT uC32. Revisa el cuadro 1 para una referencia visual.









")
")

")
