Paso 5: calibración
Introducción
Calibración de magnetómetro es el proceso de obtención de la matriz de transformación y sesgo.
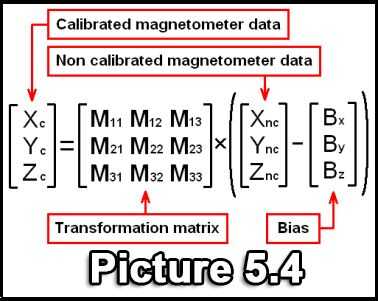
Para obtener las mediciones calibradas del campo magnético debe utilizar estas matriz de transformación y sesgo en su programa. Su algoritmo debe aplicarse el sesgo al vector de los datos del magnetómetro no calibrada (coordenadas X, Y, Z) y luego multiplicar la matriz de transformación de este vector resultante (cuadro 5.4). El algoritmo de C de estos cálculos puede encontrar en los dibujos de "Arduino_Test_Results" y "Arduino_Radius_Stabilization".
Proceso de calibración
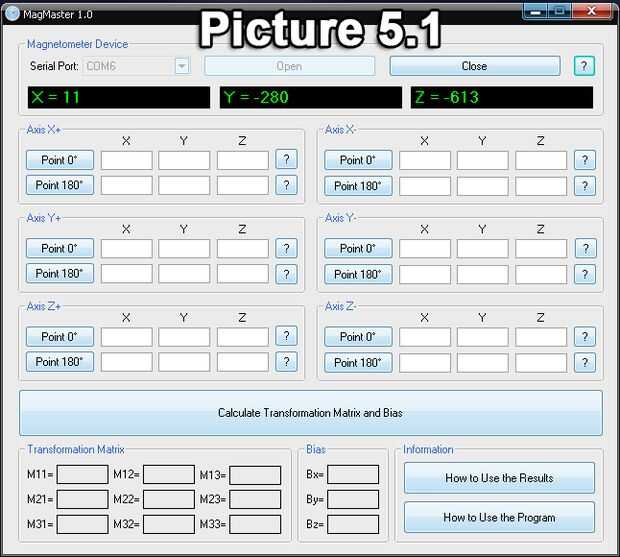
Ejecute MagMaster.exe y seleccione el puerto serie de la placa arduino. La cuerda verde en la ventana del programa indica las coordenadas del vector del magnetómetro (cuadro 5.1).
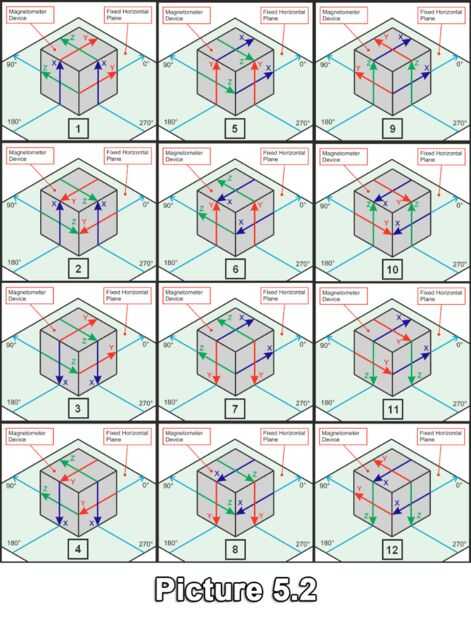
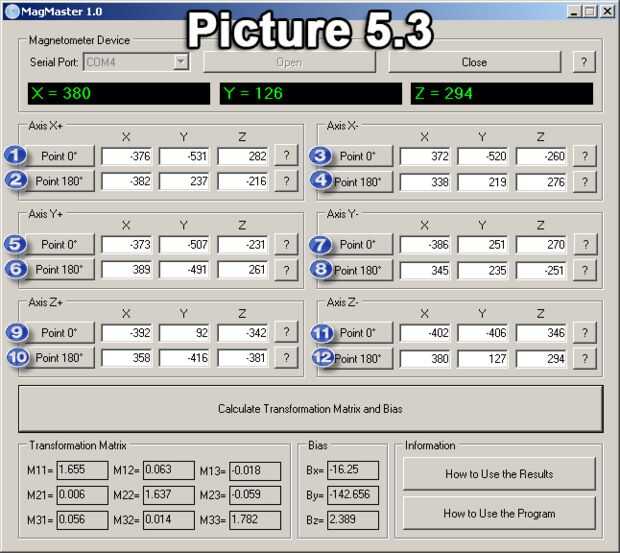
Coloque el módulo de magnetómetro (caja de calibración con el módulo adjunto magnetómetro) como se muestra en el cuadro 5.2.1 y haz clic en el botón "Punto 0" del "eje X + groupbox. Tenga en cuenta que la caja de calibración no esté parada relativamente fijo plano horizontal. Luego coloque el magnetómetro como se muestra en el cuadro 5.2.2 y haz clic en el botón "Punto 180" del "eje X + groupbox y así sucesivamente. Usted debe hacer de la siguiente manera (véase también el cuadro 5.3):
- Cuadro 5.2.1: "punto 0", "Eje X +"
- Cuadro 5.2.2: "punto 180", "Eje X +"
- Cuadro 5.2.3: "punto 0", "Eje x"
- Cuadro 5.2.4: "punto 180", "Eje x"
- Cuadro 5.2.5: "punto 0", "Eje Y +"
- Cuadro 5.2.6: "punto 180", "Eje Y +"
- Cuadro 5.2.7: "punto 0", "Eje y"
- Cuadro 5.2.8: "punto 180", "Eje y"
- Cuadro 5.2.9: "punto 0", "Eje Z +"
- Cuadro 5.2.10: "punto 180", "Eje Z +"
- Cuadro 5.2.11: "punto 0", "Eje z"
- Cuadro 5.2.12: "punto 180", "Eje z"
Usted debe llenar la tabla. Después haga clic en "Calcular transformación matriz y parcialidad" y obtener la matriz de transformación y sesgo (cuadro 5.3).
La matriz de transformación y sesgo se consiguieron! La calibración es completa!













