Paso 6: Circuitos electrónicos y software
Material:
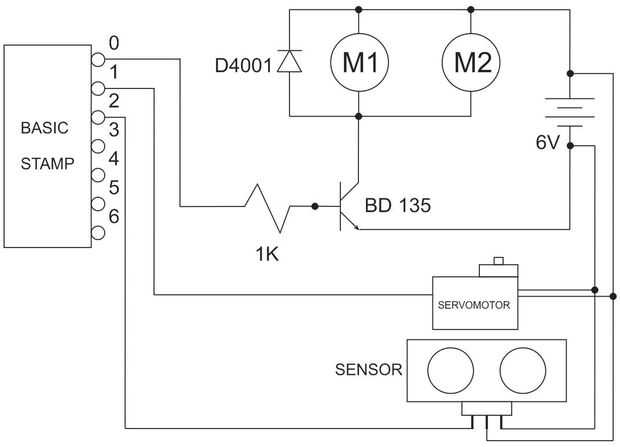
-1 x resistencia de 1 K 1 / 8 watt
-1 x diodo de rectificador 1N4001
-1 x Transistor NPN BD135
-2 x motores de juguete
-1 x servomotor estándar
-1 x sensor de distancia ultrasónico:
-Placa 1 x paso de laboratorio, con el microcontrolador Basic Stamp
-1 x 6V batería (serie 4pilhas) o una batería de 9V
-Conector de la batería cables,
El circuito funciona como sigue:
Cuando se enciende, el sensor verifica si hay algo a una distancia menor de 1,75 metros (la distancia máxima que puede medirse con este sensor es de 2 metros). Si es así, el microcontrolador activa el servomotor de la pizarra (el primero abrir y cerrar a continuación). Tras colocar el pin 0 de salida en nivel alto y luego el transistor, que funciona como una llave cierra el circuito, haciendo que los motores conecte y mantenerse conectado durante unos 2 segundos (tiempo configurable). El impulso que reciben es suficiente para mantenerlos en funcionamiento durante otros 10 segundos.
Después el microcontrolador de un descanso de unos segundos (un 5), de lectura y el ciclo se repite.
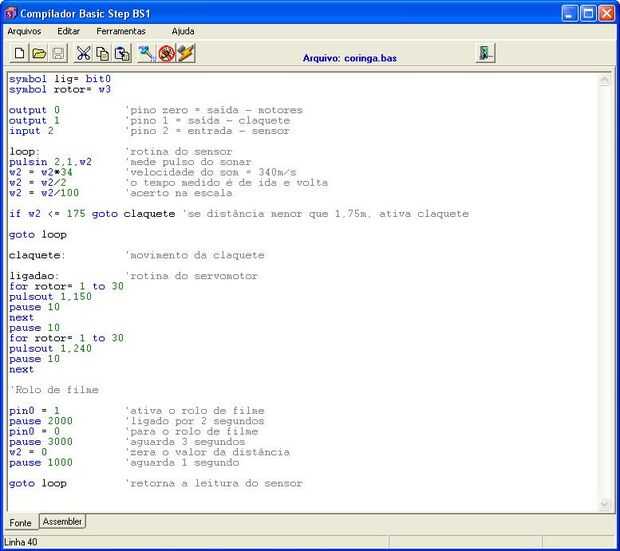
Software:
símbolo lig = bit0
rotor de símbolo = w3
salida 0 ' pino cero = salida - motores
salida 1 ' pino 1 = salida - claquete
entrada 2 ' pino 2 = entrada - sensor
Loop: ' rotina sensor
pulsin 2,1, w2 ' medo pulso hacer sonar
W2 = w2 * 34 ' velocidad hacer som = 340m/s
W2 = w2/2 ' o tempo medido é de ida e volta
W2 = w2/100 ' acerto na escala
pin0 = 0 ' coloca nível baixo ningún pino cero, desativando os motores
Si w2 < = 175 goto claquete ' se distancia menor que 1, 75m, ativa claquete
Goto bucle
claquete: ' movimento da claquete
ligadao: ' rotina servomotor
para rotor = 1 a 30
pulsout 1.150
pausa de 10
siguiente
pausa de 10
para rotor = 1 a 30
pulsout 1.240
pausa de 10
siguiente
' Rolo de filme
pin0 = 1 ' activa o rolo de filme
PAUSE 2000 ' ligado por 2 segundos
pin0 = 0 ' para o rolo de filme
PAUSE 3000 ' aguarda 4 segundos
W2 = 0 ' zera o valor da distância
PAUSE 1000 ' aguarda 1 segundo
Goto bucle ' retorna un solicitados hacer sensor
Obs.: puede mover el servo poner en marcha los motores debido a su manejo de los cepillos, que generan transitorios. Si esto sucede, sólo hay que poner un condensador electrolítico de 1000 μF / fuente de 12 V en paralelo con el poder.
La Junta paso Lab tiene un regulador de voltaje que soporta unos 20 voltios aplicados a su entrada. El circuito puede ser alimentado directamente de esta fuente porque la Junta tiene una salida de DC y uno para la alimentación del microcontrolador de 5V. También hay una placa donde todos los componentes conectados y llamado de puentes.
El circuito se podría haber hecho de otra manera en lugar de utilizar el sensor de ultrasonidos, utilizando un sensor de luz (LDR) que es mucho más barato. Sin embargo, las diferencias en brillo pueden afectar un poco el circuito y sería necesario hacer ajustes de todo el tiempo.
Yo prefiero usar un microcontrolador ya que tenemos más flexibilidad. Un cambio en la longitud de tiempo que apuntan a los motores se realiza mediante software sin tener que desconectar nada. Si se tratara de un circuito analógico, sería mucho más difícil.


 con puerta automática")


, medición y equipo de control.")







