Paso 3: Paso 3: el dispositivo de programación
Se adjunta el código para ayudar con la codificación de su propia cámara de control remoto, sino como una carrera por aquí es un resumen.
En primer lugar hemos establecido cada uno de nuestros dispositivos, con IRremote.h, wire.h, servo.h para ejecutar el programa.
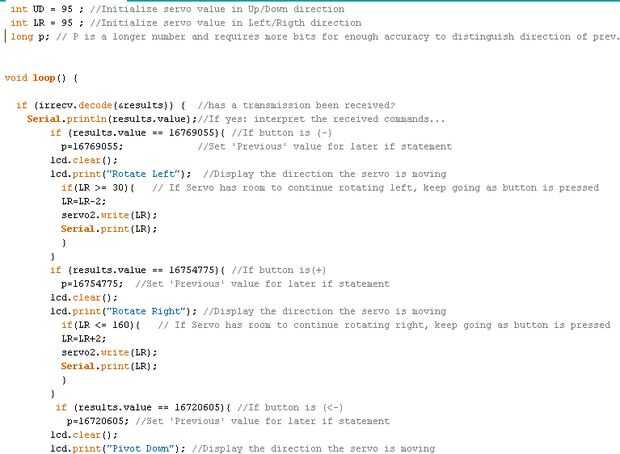
En segundo lugar, porque vamos a utilizar esto como un programa de interrupción interna, tomar en las entradas de receptores y cogemos los resultados y determinar si un valor real se ve y entonces si es uno de los cuatro botones en cuestión.
En tercer lugar, hemos establecido nuestros comandos estos si declaraciones, cuatro independientes condiciones, abajo izquierda y derecha, cada uno con un límite de para que no choque nuestros servos.
Desde aquí, el cuarto paso es agregar en un asimiento del botón leer y volver a la principal si declaraciones y set un parámetro para reconocer qué botón está detenido. Esto se realiza estableciendo una variable (p) en este caso) a la señal de entrada inicial y pidiendo más adelante programa si ve el botón' retenido' valor qué valor de p es para que pueda saber qué camino a seguir hasta que llegue su construcción en el límite.
Después de que termine este comando sale de la interrupción.




 en el receptor de infrarrojos basada en GPIO de frambuesa Pi")


")



