Paso 1: Construir tu propia cámara de giro

Son dos módulos separados, por lo tanto tenemos que usar dos módulos simultáneamente. Entonces hacemos Chip giroscopio y acelerómetro Chip en un módulo (hay dos chips en un módulo). En la última versión se hacen en un chip, minimizando la distorsión de cálculo de movimiento
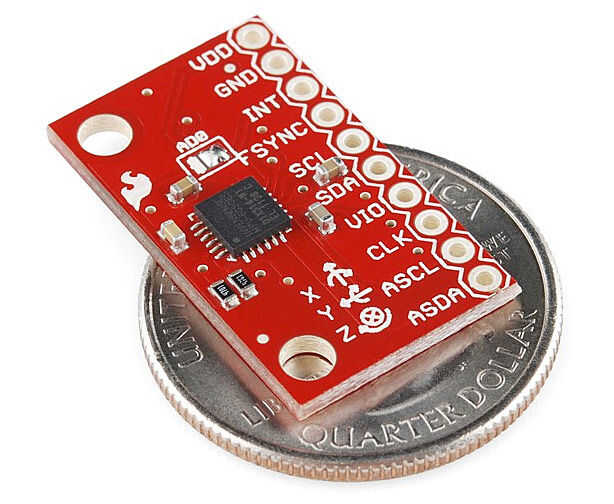
En este artículo, el módulo es Triple Eje acelerómetro y giróscopo Breakout – MPU-6050, que tiene giroscopio de 3 ejes y acelerómetro de 3 ejes en un chip, suministrado por la alimentación de 3.3 voltios.
Además de módulo de MPU6050, los siguientes módulos similares podrían también ser aplicados:
• Tablero de la fusión de IMU – ADXL345 & IMU3000
• Tablero Digital Combo de IMU – 6 grados de libertad ITG3200/ADXL345
Módulo MPU6050 con su minúsculo tamaño de 20 mm x 15 mm y altura de 1,6 mm.
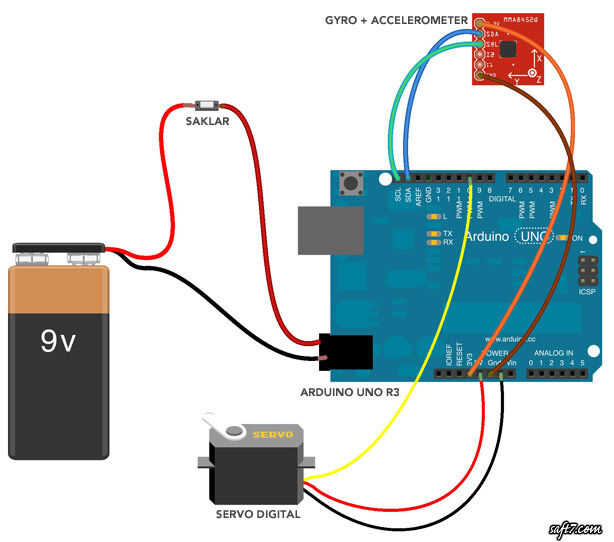
Los componentes son:
• Ejes acelerómetro y giróscopo Breakout – MPU-6050
• Arduino UNO R3
• Digital Servo (servo buena y de gran alcance de uso)
• Protoboard Mini
• Batería de 9v + interruptor
• Caja y otros accesorios.
Si usted utilizando diferentes Junta que Arduino Uno R3, pines SCL y SDA de la MPU son también diferentes:
VDD: + 3.3V
VIO: + 3.3V
GND: TIERRA
SDA: Pin A4 (Arduino Uno, Ethernet) / Pin 20 (Mega2560, Due) / Pin 2 (Leonardo)
SCL: Pin A5 (Arduino Uno, Ethernet) / 21 (Mega2560, Due) del perno / perno 3 (Leonardo)
? Soporte cámara para moto")



.")



 puede el ruido de la bici de la suciedad para motos")




