Paso 7: Calibración y pruebas

Hay algunas variables que hay que cambiar en el sketch de Arduino dependiendo de la posición del servo fue en cuando lo instalaste. Estos son:
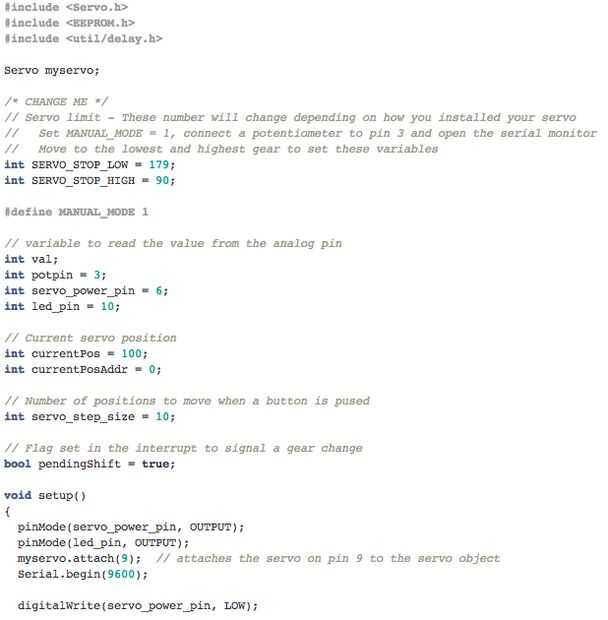
int SERVO_STOP_LOW;
int SERVO_STOP_HIGH;
Determinan cuánto puede moverse el servo. Para encontrar estos cambio
#define MANUAL_MODE 0
Para
#define MANUAL_MODE 1
Esto le permite controlar el movimiento del servo con un potenciómetro conectado al pin 3. Subir el sketch y abrir el terminal de serie. Los valores al mover el servo a sus límites y la actualización de las variables.
Cambio MANUAL_MODE a 0.
También puedes jugar con la variable servo_step_size. Determina cuánto el servo se mueve en cada pulsación.
Prueba
Cerca de todo y la bicicleta durante un tiempo asegurándose de que los engranajes y las cadenas se unen bien.
Prueba hacia cambios de engranaje para ver si se adaptan a nuevos engranajes y hasta. Si no, conectar el Arduino al ordenador y reprogramar los valores.
Buscar futuro instructables y la página del proyecto para las actualizaciones.
")








")

")

