Paso 5: Cortar el juguete coche transmisor y el receptor: pruebas
Primero tenemos que encontrar una manera de activar los botones físicos en el transmisor y hacer un micro-controlador activar estos contactos.
Instrucciones
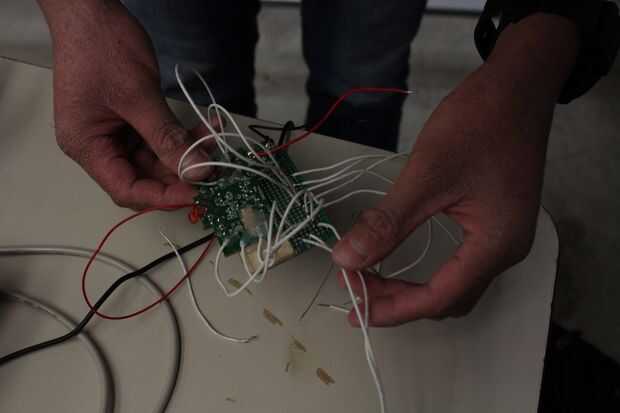
1: quitar los cuatro botones.
2: Qué es el contacto positivo y negativo de cada uno de los interruptores.
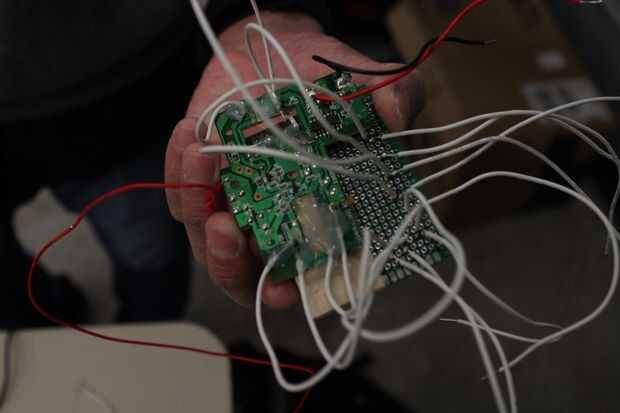
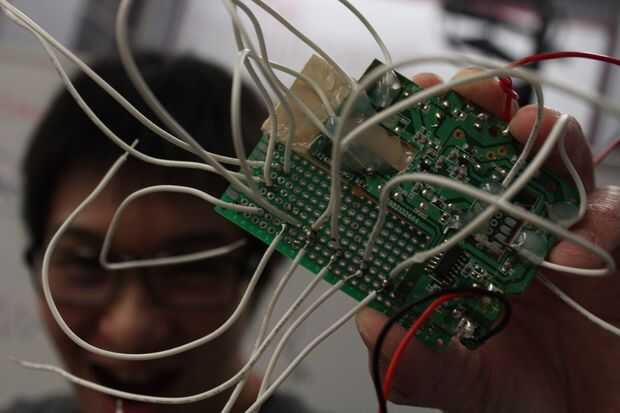
3. soldar los cables de puente a todos los contactos de los interruptores.
4: si los contactos han sido montado en superficie luego puede pegar el tablero del transmisor a una placa de prototipos. Vuelva a conectar los puentes a esa Junta de prototipos.
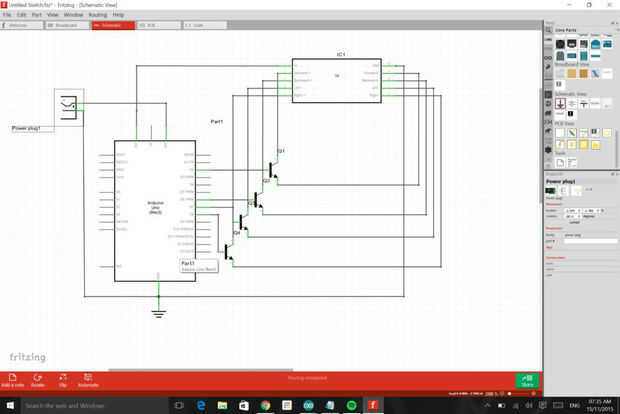
5: una vez hecho esto, conecte los puentes a sus respectivos transistores (NPN) como se muestra en el esquema.
6: conectar la base de los transistores a sus respectivos pines en el microcontrolador.
7: Conecte los cables de alimentación y comprobar el circuito.
8: alimentar a la placa de circuito revitalizante.
9: subir el sketch en el micro controlador.
10: el coche debe comenzar moviendo según bosquejo totalmente inalámbrica.
(este bosquejo es para un microcontrolador de Arduino, utiliza esto para la prueba y más tarde cambiado a Python en Raspberry PI para el control de)
Sketch de Arduino
/*
* Hardware Hackathon
* Probar código 1, esto controlará el R/C coche, este código no acepta ninguna entrada del usuario
* 14/11/15
*/
int forwardPin = 2;
int backwardPin = 7;
int leftPin = 8;
int rightPin = 9;
void setup() {}
pinMode (forwardPin, salida);
pinMode (backwardPin, salida);
pinMode (leftPin, salida);
pinMode (rightPin, salida);
Serial.Begin(9600);
}
void loop() {}
Avanzar
digitalWrite (forwardPin, HIGH);
Serial.println ("mover adelante");
Delay(750);
digitalWrite (forwardPin, bajo);
Moverse hacia atrás
digitalWrite (backwardPin, HIGH);
Serial.println ("mover hacia atrás");
Delay(750);
digitalWrite (backwardPin, bajo);
Gire a la izquierda
digitalWrite (forwardPin, HIGH);
digitalWrite (leftPin, HIGH);
Serial.println ("gire a la izquierda");
Delay(750);
digitalWrite (forwardPin, bajo);
digitalWrite (leftPin, bajo);
Gire a la derecha
digitalWrite (forwardPin, HIGH);
digitalWrite (rightPin, HIGH);
Serial.println ("gire a la derecha"); Delay(750);
digitalWrite (forwardPin, bajo);
digitalWrite (rightPin, bajo);
}













