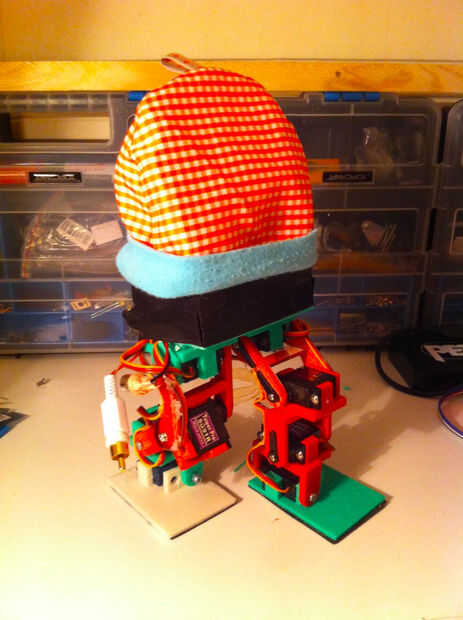
Este robot bípedo era 3D impreso.
4 servos de bajo costo (SG90 o SG91) por la pierna se utilizan para controlar el rodillo de médula y tobillo cadera, rodilla y tobillo.
Se escriben los comandos cinemáticos aplicarse simplemente en un arduino (mini). Algunos parámetros se utilizan para controlar la longitud del paso y la cadencia.
Estos parámetros pueden ser modificados mediante un módulo barato de BT (HC06).

 y LabVIEW")











