Paso 3: Smartphone controlado
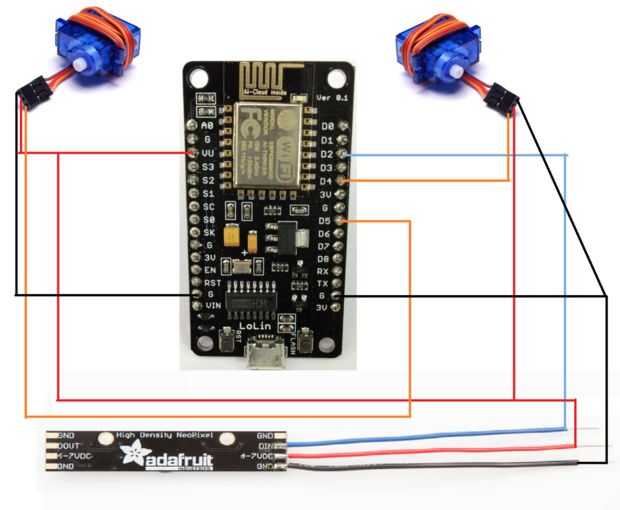

el cableado es muy simple. servos y el palo de LED consiguen su energía de pin VU en el equipo. que 5V fuentes
.
y servos y el palo del LED a tierra (G) en el equipo para el cable negativo (-).
.
después de estas conexiones puede conectar los cables de señal correspondiente.
-servo de cuello va al pin D5 en computadora
-servo de pierna va al pin D4 en computadora
-tira de led va al pin D2 en computadora
.
antes de conectar el microcontrolador poco al ordenador al programa, debemos seguir a muy pocos pasos de una vez;
1. descargar e instalar controlador cp210x
2. Siga estos pasos simples arduino IDE
3. ir aquí y biblioteca de blynk de descarga a su computadora
4. ir a www.blynk.cc en su teléfono y descargar la aplicación
5. ahora puede cargar el código - no te olvides de cambiar la configuración de la aplicación y wifi en las líneas 14 y 20
6. iniciar un nuevo proyecto en blynk la aplicación y obtener el "token de autenticación" para insertar en la línea 14 sobre
7. Añadir widget zergba, ponerlo a combinar en el perno V2 y 0-500 en cada parámetro RGB
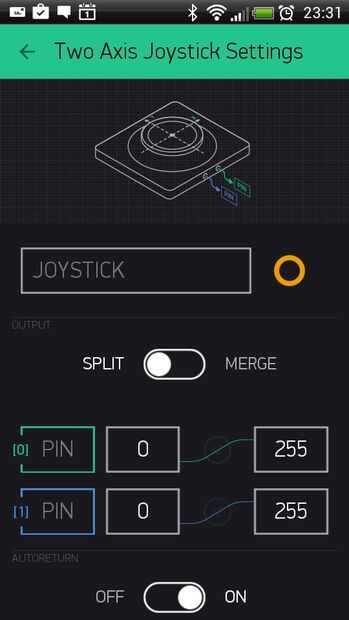
8. Añadir joystick de widget dos ejes, lo dividir en V4 0-255 y V5 70-140 (auto OFF vuelta, girar en la inclinación de)
9. Encienda tu robot con powerbank
10. pulsar "jugar" en blynk aplicación y empezar a controlar.!
 con Video Stream en vivo!!")






")





