Paso 1: Arquitectura del sistema
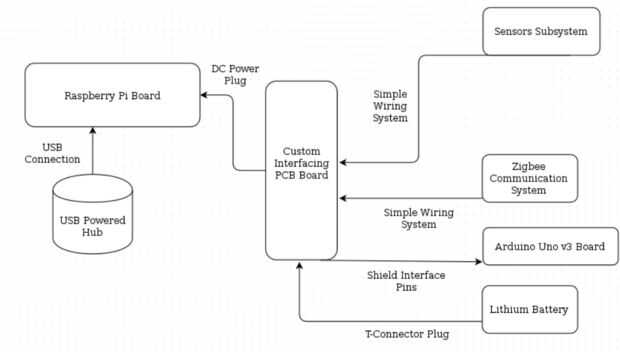



Cuando empezamos el proyecto, hemos querido seguir con la famosa declaración (mantenerlo siempre simple). Así que empezamos con el principal cerebro artificial del sistema, el Raspberry Pi, conectados las tres cámaras junto con el módem del USB 3,5 G, conectados en el Hub USB alimentado por y había conectado a una de las entradas USB de la placa Pi. Después de eso, conectamos los sensores y subsistemas de comunicación Zigbee de la placa Arduino. Por el bien de simpliness, hemos diseñado una placa PCB personalizado que tenía un mejor sensores-así como la batería de alimentación interfaz de enchufes. como se muestra un diagrama de bloques simple que explica la arquitectura hardware utilizada en CanSat II.













