Paso 1: Diseño mecánico
El chasis del robot serán toma de un juguete robot comercial. Este juguete tiene 6 patas y puede moverse adelante, atrás, girar a la derecho, gire a la izquierda y es controlado de radio. Se realizará una adaptación, con el mecanismo del robot para pasear y se añadirá cierto nivel básico de la inteligencia mediante un microcontrolador, sensores, motores y una cámara.
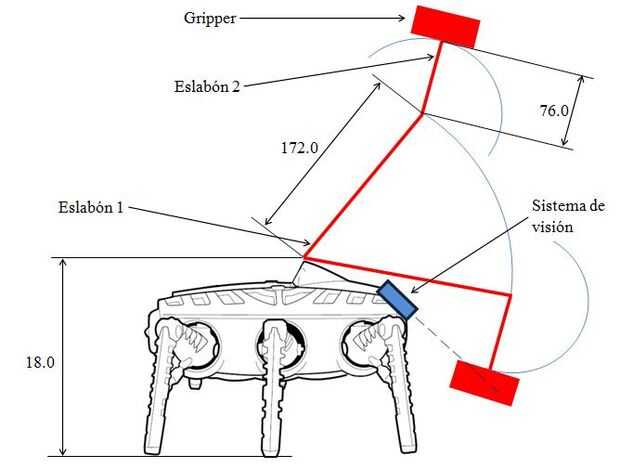
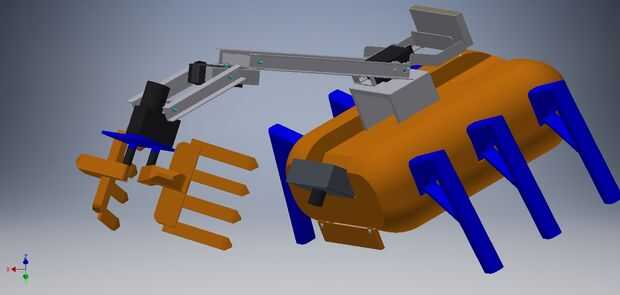
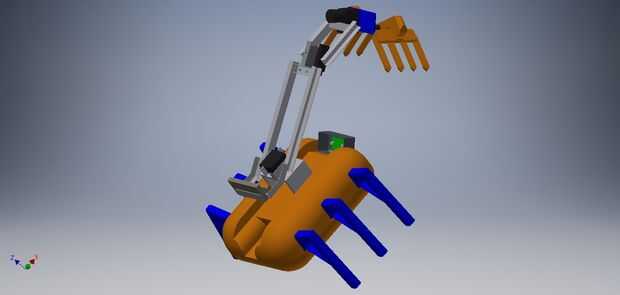
Un modelo 3D del juguete original se realiza utilizando un software de diseño (Autodesk Inventor) y los mecanismos adicionales se agregan en el proceso de diseño. Los planos de los mecanismos también fueron adquiridos desde el software y luego fabricado




")








