Paso 3: Configuración del Hardware
Montaje del cardán:
· La estructura del balancín debe ser tan rígida como sea posible para evitar las fluctuaciones retrasadas o movimientos llegar a cualquiera de los sensores IMU (si se usan dos).
· El cardán debe equilibrarse correctamente en todos los ejes con la carga conectada. Asegúrese de que el controlador de cardán (marco IMU) y cámara/carga IMU está montado correctamente.
· Sintonizar el controlador Stick PIDs con interfaz gráfica de usuario SimpleBGC. El proceso de ajuste puede ser muy tedioso, lento y frustrante. Existe suficiente literatura y ayuda en foros en línea centrados en cardán PID Sintonía tan utilizando controladores de Alexmos, consulte estos recursos a la cardán bien logrado estabilización (que será necesario para respuesta y control de vibraciones cardán gratis con el Google Glass).
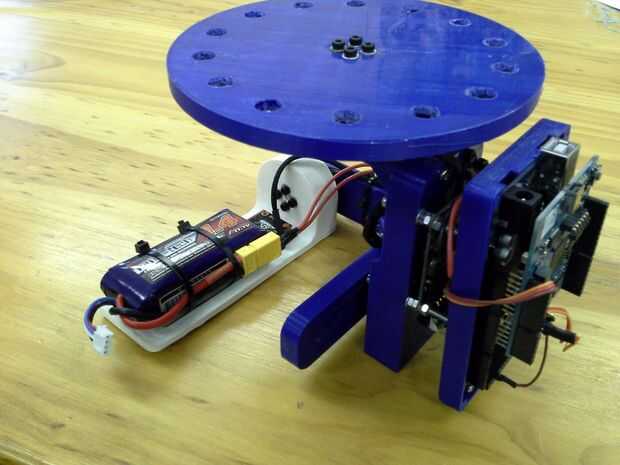
Montaje de electrónica:
· El microcontrolador Arduino con el escudo de Wi-Fi conectado debe ser montado en el cardán a continuación desvío (como se muestra en la foto de arriba) de tal manera que se puede conectar al controlador de cardán Alexmos via UART.
· El Arduino y su escudo de Wi-Fi pueden ser alimentados desde las líneas de 5V y tierra de la UART procedentes del controlador de cardán. El controlador Stick recibe energía de la célula 3 batería Li-Po.
· El puerto UART debe etiquetarse en el controlador Stick (se refiere también a como el "Puerto de serie Bluetooth"). Una línea de señal (alambre conductor normal) conecta pin de (Tx) UART que transmite de Arduino con pin de (Rx) UART recibe de la Junta de Alexmos. Comunicación sólo tiene lugar una sola dirección, desde el Arduino envía el cardán comandos de controlador de cómo orientarse a sí mismo, pero no recibe nada a cambio.
· Número de pin de UART Tx del Arduino puede especificarse, ya que es un puerto de serie de software (el escudo de Wi-Fi ya utiliza los puertos de serie de hardware). El número pin se especifica en el archivo de encabezado de biblioteca API serie SBGC (discutido en el paso 4). El número de pin por defecto cuando se utiliza el Arduino Mega es Pin 49 (esto tendrá que cambiar cuando se utiliza Uno, ya que tiene muchos pines).

\"")











