Paso 7: Configuración de Control inalámbrico
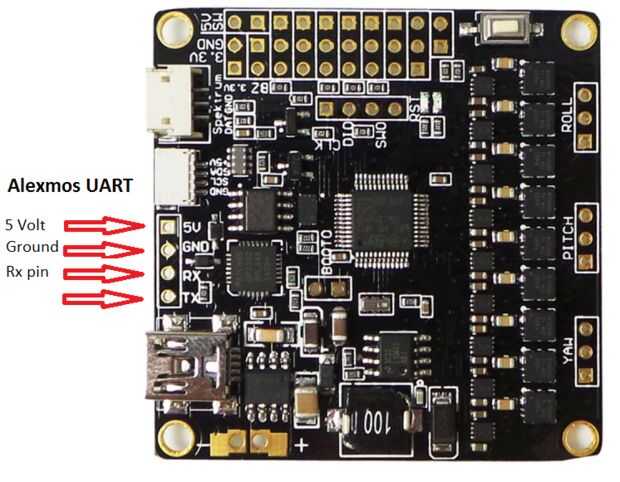

En este punto, ambos dispositivos son conectar en la misma red y pueden comunicarse entre sí. Para probar la comunicación, simplemente abrir el código de Arduino en el IDE de Arduino y (con el Arduino conectado al PC), haga clic en el botón serial en la esquina superior derecha. Desplácese hasta la aplicación de Control cardán en Google Glass y seleccione la opción de "Stick Control" dos veces. En la ventana de Arduino serial ahora debería ver los datos de orientación de los Google Glass (también visible en HUD el vidrio) se muestra a un ritmo de 10Hz. Esto significa que el sistema funciona correctamente. El único paso que queda es conectar UART Rx puerto del controlador Alexmos a Puerto de UART Tx del Arduino (el número de puerto es como se define en el paso 1a).
Cuando se enciende el regulador de cardán Alexmos, debe poder en el Arduino y su escudo de Wi-Fi así (suponiendo que un 5V y los cables de tierra se conectan a Arduino de la Alexmos). El Arduino debe encender con el script (o código) cargado a él e inicializar el controlador de cardán. Una vez que el Arduino, cardán regulador y protector de la conexión Wi-Fi está listo y conectado a un hotspot Wi-Fi, el Google Glass puede utilizarse para controlar el desvío, echada y rodillo ejes de cardán, suponiendo que PIDs de todos los ejes son correctamente afinados y.

\"")











