Paso 2: cableado
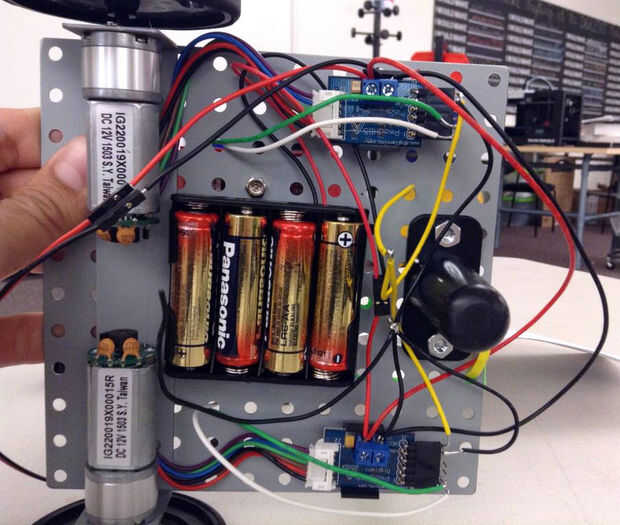
En primer lugar, conecte el PmodHB5 a los motores que utilizan el conector incorporado. Luego conecte las conexiones de 3,3 v y tierra para cada uno de los Pmods.
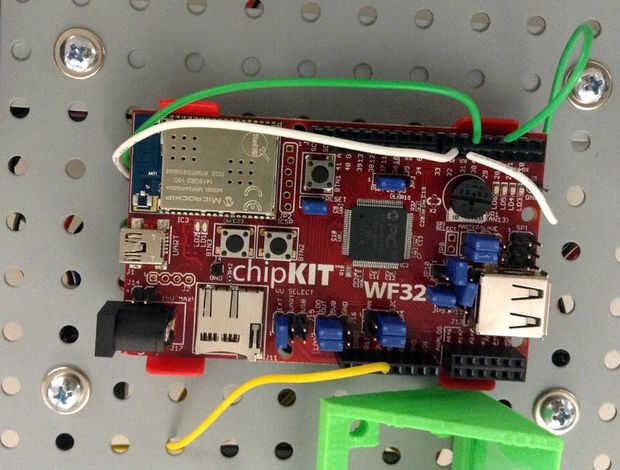
El primer pin en el PmodHB5 determina la dirección del motor, el motor izquierdo, conectar este pin a Canal 33 en el chipKIT WF32 y conectar este pin a canal 32 para el motor adecuado.
El segundo pasador en la PmodHB5 determina la velocidad del motor mediante PWM. Conecte el segundo pin del motor izquierdo a canal 5 en el WF32 y conecte a canal 3 para el motor adecuado.
Conecte la alimentación y la tierra de las baterías a cada uno de los terminales de PmodHB5 para alimentar los motores. También, enviar el voltaje para alimentar el tablero conectando los cables negativo y positivo a J14 en el WF32 * Asegúrese de que el puente marcado seleccione VU está ajustado en EXT (foto arriba).

")











