Paso 6: programación
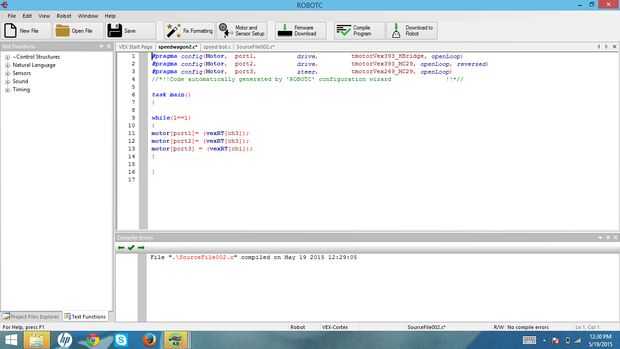
Para la programación, uno de los motores impulsores se invertirá. Esto es porque uno de los motores tiene un cociente del engranaje de 1:1 al eje de la unidad del otro motor. El motor tendrá que invertir porque cada engranaje cambiar eso sucede, los motores se invertirá. La imagen es cómo había programado en Robotc.
La imagen muestra mi programa en Robotc. Un joystick impulsa el robot hacia adelante y hacia atrás. El otro joystick da vuelta una rueda en la parte frontal del robot que dirige el bot.






")






