Paso 2: Dejar que la bestia cobran vida!
OK, tienes tu catapulta montada y lista para pasar un buen rato! Ahora deberás añadir algo de código para hacer su nuevo juguete.
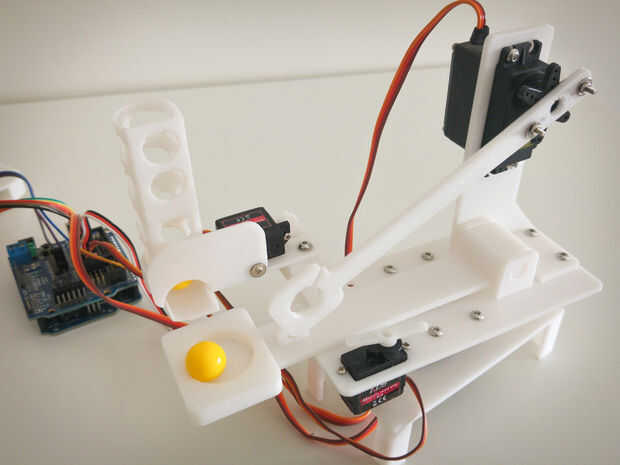
Conecte el servo:
Servo motores de trabajo aplicando una señal PWM (modulación de anchura de pulso) que ajusta la posición del servo motor. Para controlar servos desde arduino tendrás que usar pines PWM (3,4,5,6,9,10 en Arduino UNO), he conectado mi servos como sigue:
- Base motor - pin 9
- Bandeja motor-pin 6
- Brazo motor - pin 5
- Motor de la cerradura de bandeja - pin 3
Añadir algo de poder:
No debe confiar en la fuente de alimentación de tu Arduino para alimentar el servo. Debe utilizarse una fuente de alimentación externa (un 5V 2A debería ser suficiente). Conecte el protector del sensor a la fuente de alimentación y asegúrese de configurar el protector del sensor para utilizar una fuente de energía externa (quitando el jumper seleccione potencia).
Hacen mover!
Se puede utilizar mi código para traer su catapulta a la vida, pero quiero desafiarte a hacerlo por su cuenta!
Si eres nuevo a la programación de arduino aquí son algunos consejos para usted:
- Aquí le damos una guía básica sobre el uso de servomotores con arduino,
- Comience con un motor y luego añadir los otros.
- Servo motores tienden a reaccionar con rapidez, que no es lo queremos. Añadir algún código, retraso para crear un efecto de barrido cuando se mueven los motores.
- Escriba el código como una historia, asegúrese de que esté legible. Por ejemplo usar nombres apropiados para las variables ('baseMotor' y no 'motor1')
- Su catapulta puede cargar automáticamente 'balas' de revista, tiempo puede difícil de bandeja
 Básicos Arduino Robot buscador de luz!")









 :-)")

