Paso 4: Instalación de componentes electrónicos
- Instalación de componentes electrónicos
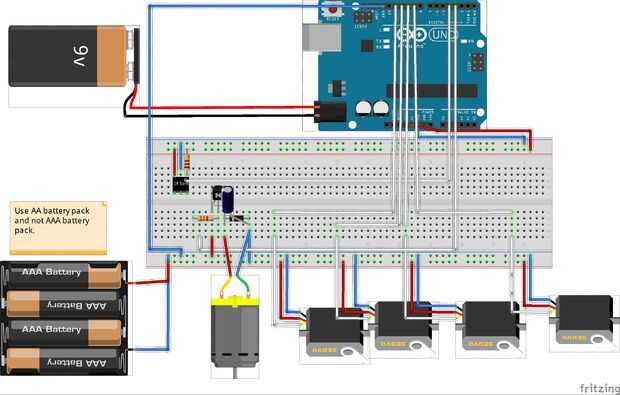
Conectar el Arduino y el receptor de infrarrojos a un lado de la placa y el motor de la c.c. y 4 servos al otro lado porque los servos y el motor llamar a mucho actual para el Arduino al poderles. Estos van a conectarse a una fuente de energía externa (el paquete de baterías AA 4). Nada más que un servo necesita una fuente de energía externa. Las 4 pilas AA funciona bien porque proporciona 6V que es suficiente para poder la
componentes.
Si usted quiere hacer o editar el diagrama del circuito de Fritzing necesita descargar este software gratuito:
http://Fritzing.org/
1. conectar el Arduino a la placa.
A. Conecte los 5V en el Arduino en el riel de alimentación a la derecha a la placa (el lado con una-e)
B. Conecte uno de los motivos a la + lateral de la placa (una vez más a la derecha.)
2. Configure el receptor IR
A. poner el receptor IR en el lado derecho de la placa con la parte redondeada hacia usted. (Yo usé E27, 28, 29)
B. Conecte la pierna derecha con el lado de alimentación del tren de potencia (uso el puente los cables hace esto más ordenado).
C. Conecte la pata central a tierra (cable de puente).
D. Conecte la resistencia de ohmio 10 k a la pierna izquierda en un extremo y el poder en el otro extremo.
E. Conecte la pierna izquierda también al pin #4 en el Arduino.
3. configurar el motor de la c.c.
A. Instale el transistor para 24,25,26 de pernos en el lado izquierdo de la beardboard con la parte redondeada hacia usted. fila f.
B. instalar el diodo sea el lado de la tira blanca en G29. Y el otro lado G26 (con la pierna izquierda del transistor).
Importa la polaridad.
C. Conecte la resistencia así que ti plus en pernos G25 y G21. (La polaridad no importa.)
D. Conecte el capacitor de 470uF a I29 (la pierna más larga es el positivo.) Y la pierna más corta (-) a I26.
E. ahora Conecte J29 en el riel de alimentación. Y J24 a tierra.
F el. finalmente Conecte J21 al pin #3 sobre Arduino
4. Instale los Servos en el lado izquierdo de la protoboard con motor de corriente continua.
A. Conecte el cable marrón desde el servo hasta G3. I3 se conecta al carril de tierra.
B. Conecte el cable rojo al G4. I4 se conecta a la alimentación.
C. Conecte el cable amarillo al G5. I6 se conecta al pin # 12 de Arduino.
D. Repita este proceso para los otros 3 servos en un lugar diferente en el protoboard.
5. Conecte la fuente de alimentación externa
A. en un extremo Conecte el cable rojo del suministro eléctrico en el riel de alimentación en el lado izquierdo de la protoboard.
B. Conecte el cable negro con el carril de tierra.
6. Conecte una batería de 9V para conectar y enchufe el enchufe en el Arduino. (para cargar el software necesita enchufe el cable USB en el Arduino y esto también será energía. Para que sea una unidad independiente para el producto final la batería de 9V hace posible tener cable externo que va fuera de la caja negra.)
7. por último Conecte el carril de tierra en el lado izquierdo de la protoboard a la tierra en el Arduino. (Todas las piezas tienen que tener un terreno común. Esto conecta ambos lados de la placa.

")










")
