Paso 4: conexiones
Ahora ¿por qué estos componentes?
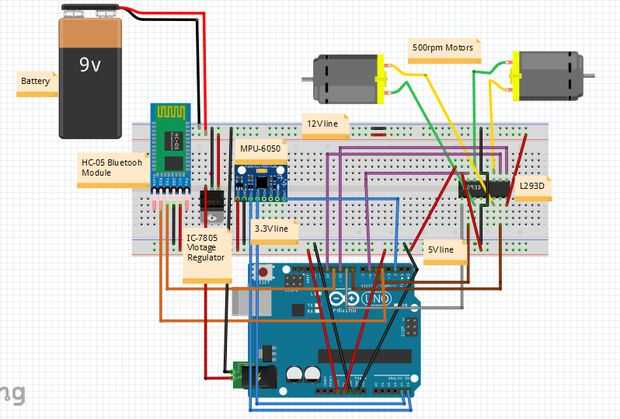
MPU-6050 es usado debido a su capacidad DMP. Puede procesar los valores crudos acelerómetro y giroscopio para dar el Yaw, Pitch y rodillo. Disminuye grandemente la carga de cómputo.
HC-05 El módulo Bluetooth se utiliza para comunicación entre robot y androide app.
Controlador de motor L293d se utiliza para controlar el motor.
IC7805 voltaje regulador se utiliza para proporcionar fuente de alimentación de 5V de Arduino. Sin embargo, no es necesario usar este IC y batería puede ser directamente conectada a Arduino. Esto se utiliza sólo para propósitos de seguridad
Se adjunta un archivo fritizing para mostrar las conexiones. Conecte todo como se muestra.
Ahora como todo sistema, podemos realizar inmersiones en el código para nuestro robot.













