Paso 4: Montaje de tus motores: Direct Drive con ruedas de cinta de conducto

Motores de transmisión directa son los motores más fácil montar.
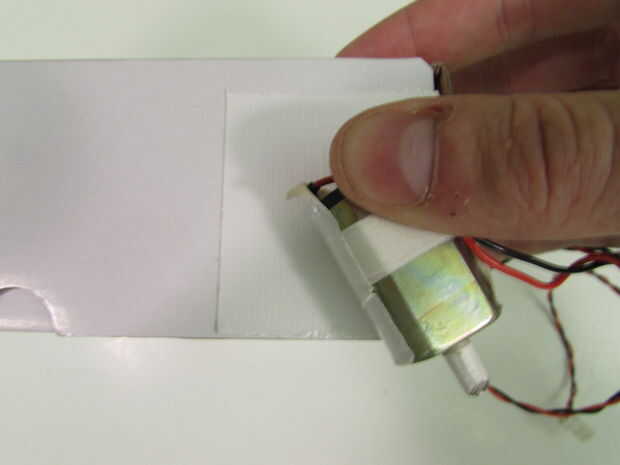
Voltee la caja otra vez y añadir una pieza aproximadamente cuadrada de cinta adhesiva a la parte frontal de tu caja, en una de las esquinas inferiores. Se trata de donde montamos nuestro motor.
Envuelva su motor en cinta. Esto hará más fácil de quitar de la caja si se rompe o decidimos cambiar nuestro motor con el otro.
Antes de que pegue, usted querrá comprobar su colocación y el ángulo. Había olvidado de ello y tuvo que volver a hacer ese paso, para que pueda aprender de mis errores. La clave creo que querrá tener en cuenta al decidir sobre un buen ángulo es que la punta de la rueda tiene que ser inferior a todo lo demás por lo que tu robot se basa en la rueda y no la parte inferior de tu caja o una de las esquinas de su motor. Usted también quiere mantener su motor en un ángulo para que la rueda puede rodar y girar no sólo en el lugar.
Ahora que sabes qué ángulo que quieres tu motor, pegamento en! Tenga en cuenta, no necesita mucho pegamento para mantener el motor en su lugar y el menos pegamento utilizas, más fácil será tirar el motor apagado si desea reemplazarlo.
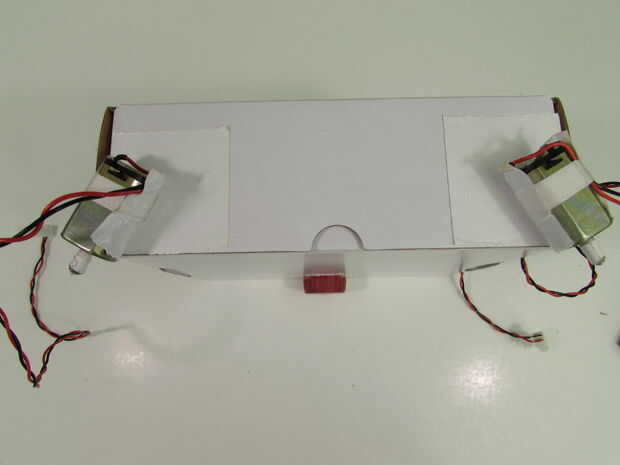
Hacer esto para ambos lados, y ya tienes tus montados los motores!
Cabe destacar que usted puede utilizar este método de montaje para dos motores de accionamiento directo y motorreductores. La única diferencia es qué ángulo de montar los motores en. Sin embargo, este método deja el robot mirando un poco áspera, con es motores en el exterior y los cables colgando por todas partes. A continuación te mostraré un método más limpio que tanto no deja a la intemperie.













