¿Paso 8: Dónde está llenando el Robot?






(El resto de este proyecto supone que utiliza el primer método de montaje para los motores de accionamiento directo con ruedas de cinta del conducto, pero los directores aplican todavía a robots con motores caja de cambios).
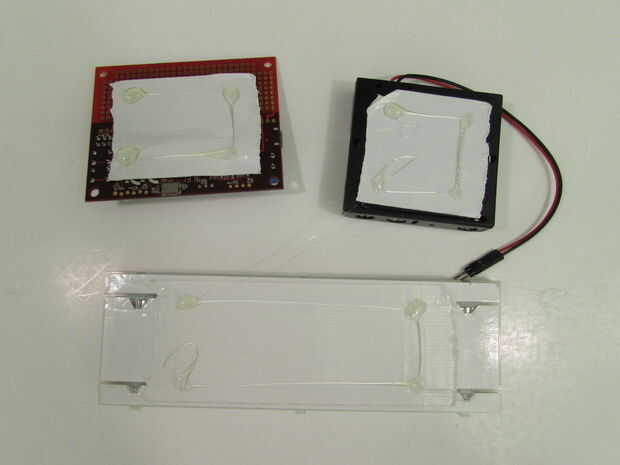
Tenemos nuestros motores montados, no significa que estamos Inicio libre todavía. No queremos que nuestras piezas confunde alrededor dentro de la caja mientras nuestro robot alrededor. Imagínate si tus entrañas vibraron alrededor dentro de usted cuando usted caminaba. No la diversión. Vamos a conseguir esas piezas de encolar.
Vas a querer empezar colocando una tira de cinta aislante por donde quieras tus piezas para ir. Cuando pongo mi protoboard, revisé para ver cómo encajaría con mi pack DP32 y batería en primer lugar, antes de colocar la tira de cinta de.
Ponga alguna cinta en sus piezas a continuación. Cinta se desprenderá más fácilmente que el pegamento. No tienes que cubrir totalmente su parte inferior con cinta, tan sólo tiene que utilizar bastante. De hecho, me aseguré de que ninguno de mi cinta se cuelgue los extremos porque se ve mejor. Ahora poner pegamento en las piezas (no demasiado cerca del borde de la cinta y no demasiado) y presione hacia abajo.













