Paso 10: Diseñar una GUI de Chefbot usando Qt y Python
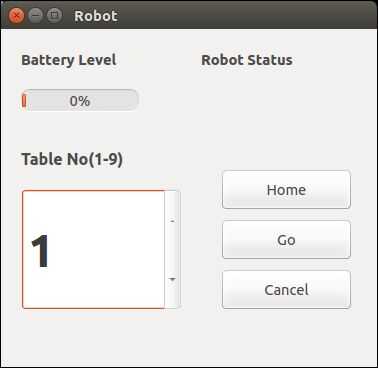
En este paso estamos construyendo un comandante GUI para el robot. Utilizando la GUI, podemos mandar el robot a ir en una posición de la tabla en un hotel como el entorno.
Después de construir el mapa, podemos empezar AMCL para localizar y comandos al robot para entrar en una pose particular del mapa. Podemos recuperar cada pose del mapa.
La GUI del robot se coloca en la carpeta de scripts de chefbot_bringup de chefbot llamada robot_gui.py
Comienzo al mando de robot en mirador
Inicio Gazebo simulación de ambiente hotel
Con el mapa generado de lanzamiento AMCL
Ver robot en Rviz y corregir la postura inicial del robot en el mapa utilizando el botón de Cálculo 2D plantean
Utilizando el botón 2D objetivo Nav , podemos mandar el robot en el mapa. Llegaremos a la pose de robot de comando siguiente
Podemos recoger cada pose de tabla y alimentar dentro de la robot_gui.py, las poses son difíciles codificados dentro de este código. Después de conseguir cada posición de la tabla, podemos empezar a correr el comandante robot GUI
Seleccione el número de la tabla y pulsa el botón ir. Aquí estamos tomando un tablas de 3 x 3 Hotel



")


 Stage1Model2")

")
")
 /w Arduino")


")