Paso 11: Calibración y pruebas de Chefbot

Tras la integración completa de robot y la GUI, el paso final es para calibrar y probar el robot.
Primero tenemos que calibrar después de sensores
- Kinect/Asus Xtion Pro
- Calibración de odometría rueda
- Calibración del MPU 6050
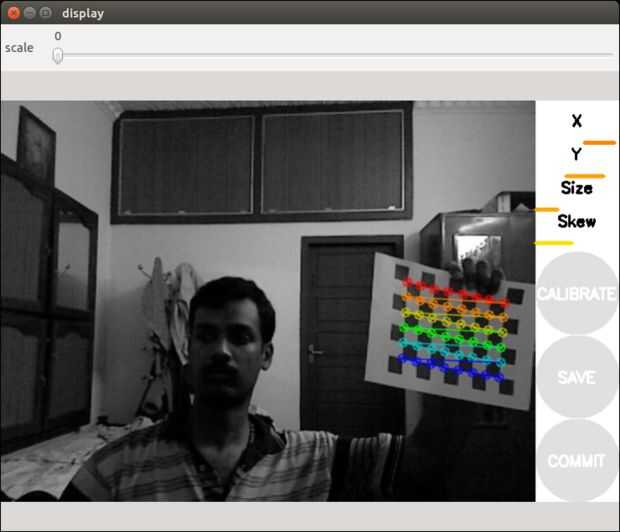
ROS - calibración del sensor 3D
En ROS, tenemos un paquete para realizar la calibración de imagen RGB y profundidad. Continuación el comando para instalar este paquete de calibración
Siguiente tutorial lo guiará para calibrar el robot: Tutorial enlace
Imagen Galería muestra el RGB y calibración de profundidad de imagen del sensor 3D
Los datos de calibración de odometría y IMU necesitan ser referido del libro sí mismo. También se puede ver cómo probar la GUI e insertando nuevas poses dentro del código.
Espero que todos disfrutan del tutorial de inicio rápido para construir Chefbot. No puedo explicar el libro entero contenido aquí pero este tutorial da una idea de construir un robot móvil autónomo.
Si desea conocer más detalles del diseño del robot; usted puede pedido el libro.
Saludos



")


 Stage1Model2")

")
")
 /w Arduino")


")