Paso 2: Trabajar con simulación de Robot con R.O.S y Gazebo

Después de diseñar el modelo 3D del robot, el siguiente paso es simular el robot. He describo simulación completa del robot desde cero en el libro. La simulación se realiza utilizando R.O.S y Gazebo.
Aquí le damos la guia para hacer la simulación de robot.
Requisitos previos para la simulación:
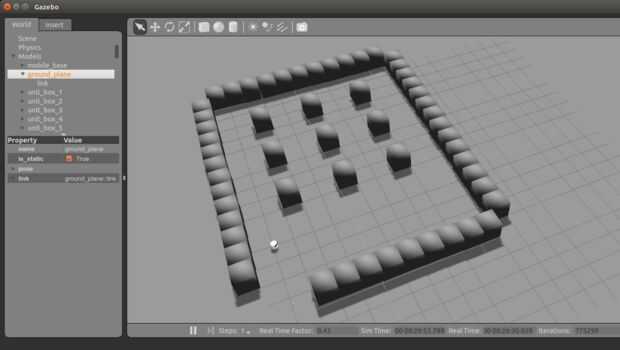
La primera figura muestra la simulación Chefbot en el Gazebo.
Necesitamos seguir R.O.S paquetes para realizar esta simulación.
Comando instalará las dependencias necesarias.
Espacio de trabajo de ajuste R.O.S herbacea
- Configurar un espacio de trabajo de Herbacea utilizando las siguientes instrucciones.
- Clonar el repositorio de Chefbot usando el siguiente comando
De los archivos clonados, copiar la carpeta chefbot en la carpeta de src Herbacea espacio de trabajo y construir el espacio de trabajo utilizando el comando catkin_make .
Simulación de corriente Chefbot
Iniciar la simulación usando el siguiente comando
Esto abrirá el Gazebo simulador con un hotel como el entorno que se muestra en la segunda imagen.
Ahora estamos tratando de implementar la navegación autónoma en simulación. Primero tenemos que realizar SLAM para construir el mapa del medio ambiente y después de construir el mapa, tenemos que correr AMCL nodos para localizar el robot en el mapa.
Después de la localización, puede ordenar a robot en una posición de la tabla para la entrega de la comida y volverá a la posición inicial después de la entrega de alimentos.
Realización de SLAM con Chefbot
Podemos ver cómo realizar el golpe y AMCL utilizando el entorno simulado.
Iniciar el algoritmo SLAM usando el siguiente comando
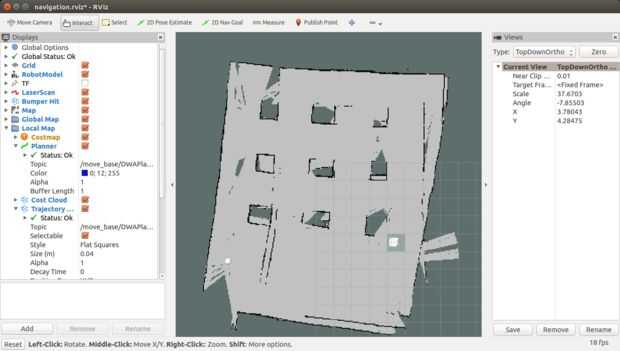
Empezar a visualizar el mapa en Rviz usando el siguiente comando
Podemos empezar a mapeo de todo el hotel moviendo el robot en el ambiente.
Podemos mover robot manualmente utilizando teleoperación, comando puede utilizarse para teleoperación para Chefbot
Podemos generar el mapa del medio ambiente como se muestra a continuación. Cuando la asignación se ha completado podemos guardar el mapa a un archivo mediante siguiente comando
Utiliza este mapa guardado para el siguiente paso para hacer AMCL
Realizar AMCL en Chefbot
Después de guardar el mapa, cerca terminal todos y empezar el Gazebo y sus nodos utilizando el siguiente comando
Lanzamiento del nodo AMCL usando el siguiente comando
Rviz de inicio con la configuración necesaria para la visualización
Ahora podemos ver el robot se localiza en el mapa que está teniendo la misma posición del Gazebo.
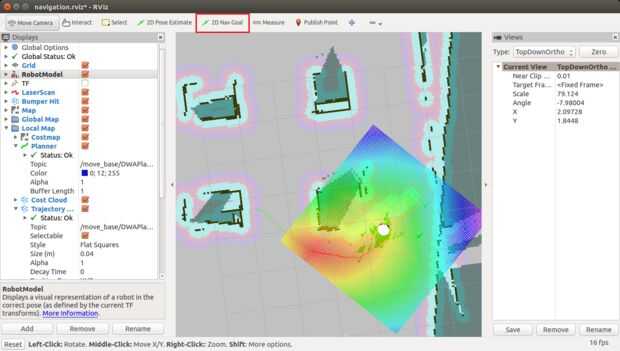
Podemos mandar el robot a una posición particular dentro de mapa utilizando Rviz 2D Nav objetivo botón.
Con botón 2D Nav objetivo podemos dar una pose de meta al robot y luego ves el robot a planificar una ruta a esa posición y hacia ese camino de forma autónoma evitando los obstáculos.
Hemos realizado la simulación del robot completo, ahora es el momento de diseñar el prototipo del hardware del robot simulado.



")


 Stage1Model2")

")
")
 /w Arduino")


")