Paso 5: Trabajando con sensores Chefbot
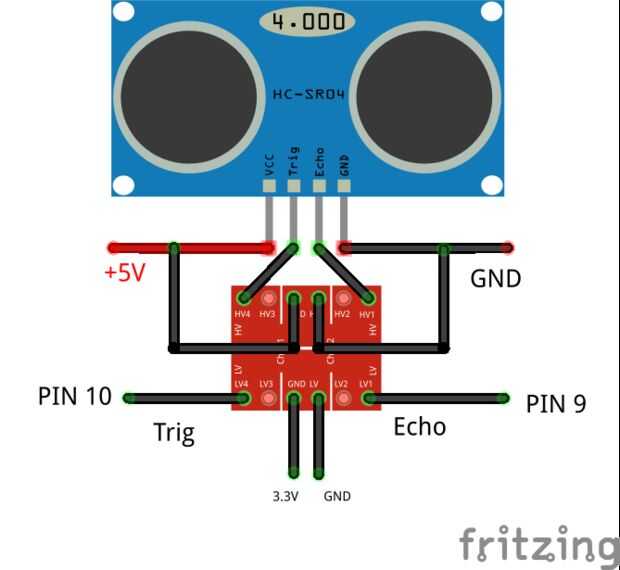
El robot tiene sensores de ultrasonido que se utiliza para detectan colisiones y también tiene una IMU llamado MPU 6050 que ayuda para informática robot odometría.
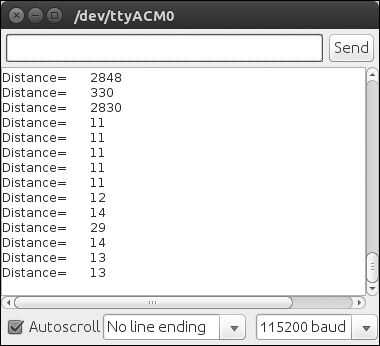
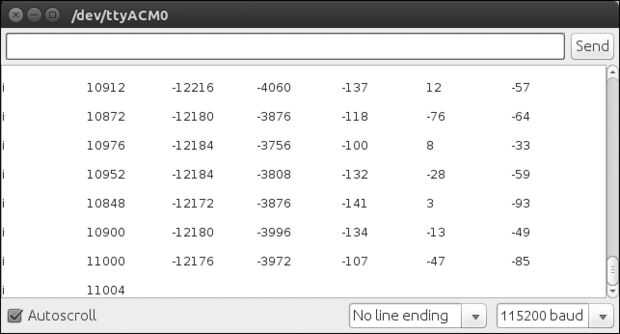
Obtendrá el diagrama del circuito del sensor de ultrasonidos entretela Tiva C Launchpad y su código. La salida esperada de este código también se muestra en las imágenes.
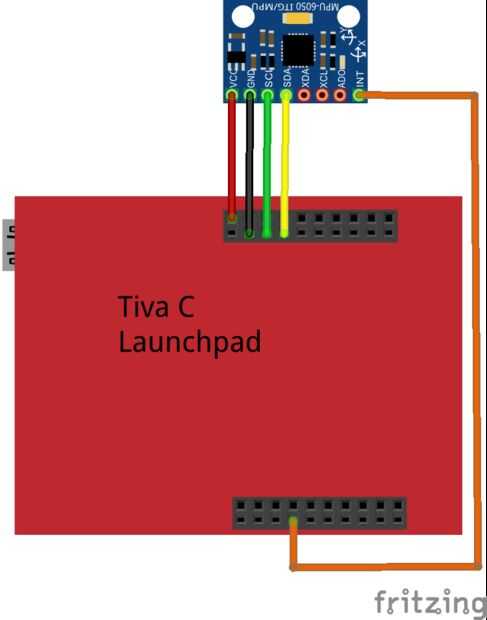
Interfaz MPU 6050 con Tiva C Launchpad
El diagrama de interconexión de MPU 6050 IMU se expone a continuación.
Los pines son los siguientes
Launchpad Pins| Pernos de MPU 6050
+ 3,3 V | VCC/VDD
TOMA DE TIERRA | TOMA DE TIERRA
PD0 | SCL
PD1 | SDA
El código de la interfaz y la biblioteca de 6050 MPU se unen en este paso. Tienes que copiar la librería MPU 6050 al lugar sketchbook/bibliotecas para compilar el código.
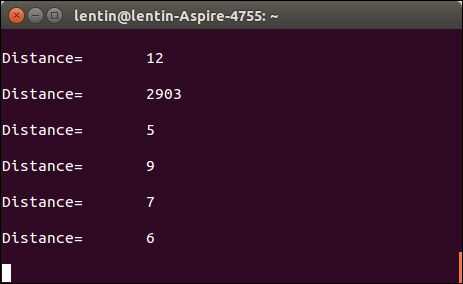
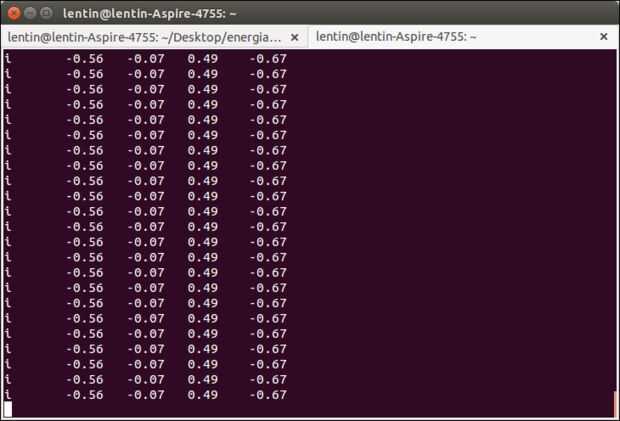
Obtendremos la salida en el monitor serial si todo funciona bien. También podemos imprimir los valores de los sensores usando un script en python, que también se une!!!



")


 Stage1Model2")

")
")
 /w Arduino")


")