Paso 4: Software
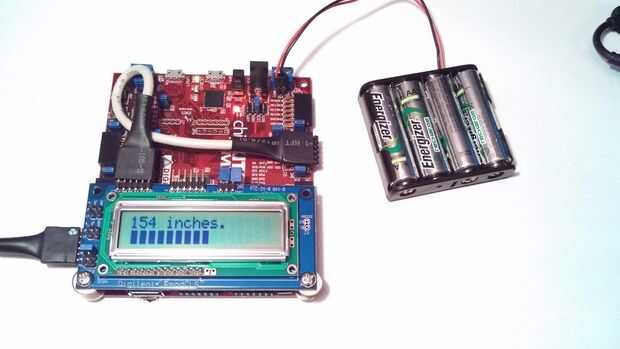

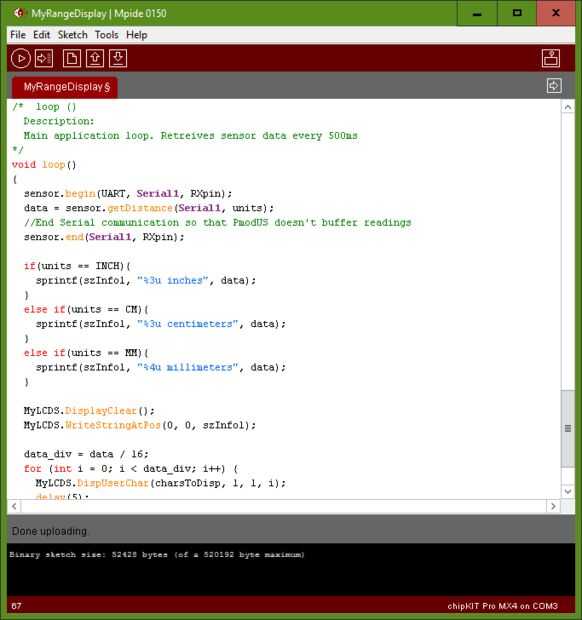
Descargar la carpeta MyRangeDisplay y abrir MyRangeDisplay.pde con MPIDE. Esto sube a la tabla MX4 y debe mostrar la distancia desde el módulo del sonar a la más cercana de obstáculo detectable. Sólo tengo un sensor que se muestra en la pantalla pero cuando llego a otra que modificará para demostrar ambos en la misma pantalla. Podría ser más estrecho en la pantalla pero ayudará al respaldo hacia algo en un ángulo.
La más actualizada versión de este programa será en mi GitHub aquí. Sé que voy a tener que modificar el programa para que sea más de mi agrado.













