Paso 3: Instalar los servos de pista





Conecte los servos
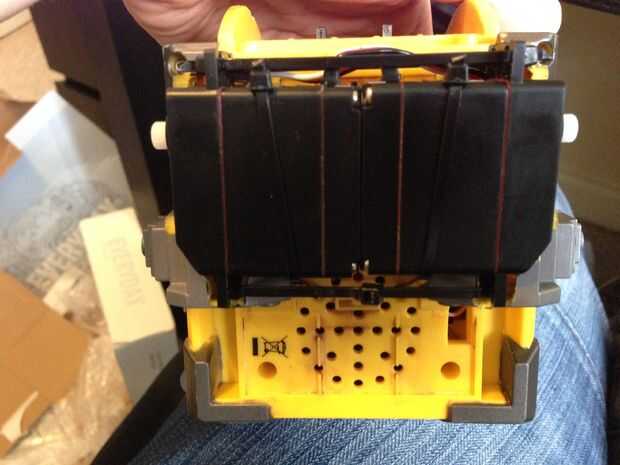
Alinee los 2 servos de rotación continua, base a base con los engranajes servo principal enfrente de la otra (con cinta adhesiva si ayuda) y luego con la placa base boca abajo (la parte inferior hacia usted) mantienen los servos contra esto, alineando los engranajes servo con donde el eje de pista utilizado, y más o menos dibujar a su alrededor.
Usando una herramienta Dremel, recortar cualquier elemento plástico que sobresale impide estar al ras con la placa base, teniendo cuidado de no cortar lo agujeros para las pistas de montaje del lado de los servos.
Una vez recortada, conecte los servos por cualquier medio suites usted (ocasionalmente ofrecen pistas para asegurarse de que el servo se preparan las líneas con el centro de la rueda guía trasera nos va conducir). Prefiero hacer las cosas tan reemplazable como sea posible así que usé un montón de ataduras de cremallera y algunos extra fuerte doble cara cinta adhesiva, pero caliente pegado les funcionaría igual de bien.
Una vez en su lugar, pase los cables a través de al otro lado de la placa base para que estén dentro de la parte del cuerpo principal cuando nosotros nos encargamos de Wall-e hacia atrás.
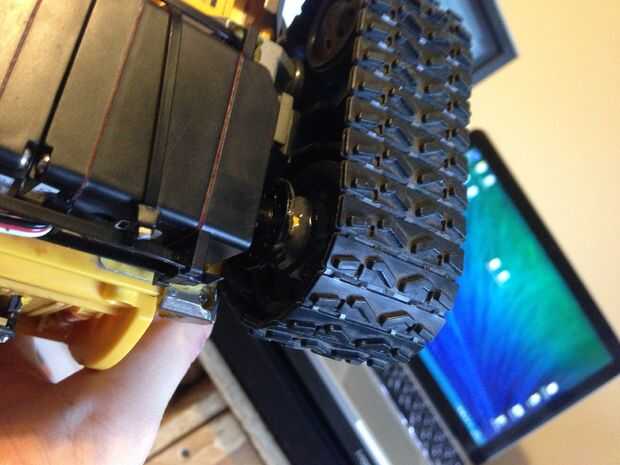
Fijar las pistas
A los servos en su lugar, fijar un cuerno del servo a los extremos de servo, luego ofrecer las ruedas de pista y mida la distancia entre la rueda y el cuerno del servo.
Encontrar un material adecuado para hacer un separador para llenar la brecha entre el cuerno del servo y la rueda (utilicé un viejo cubo de la rueda de lego), cortarlo a la medida (si es necesario) y luego usar algunos JB Weld para unir la rueda + separador + Asamblea de horn de servo.
Una vez seco, atornille las pistas detrás a la placa base de montaje del cuerno del servo a los servos a la vez. Si todo fue medido alineado correctamente éstos deben todos ajuste perfectamente.













