Paso 5: Hacer conexiones Inter-555
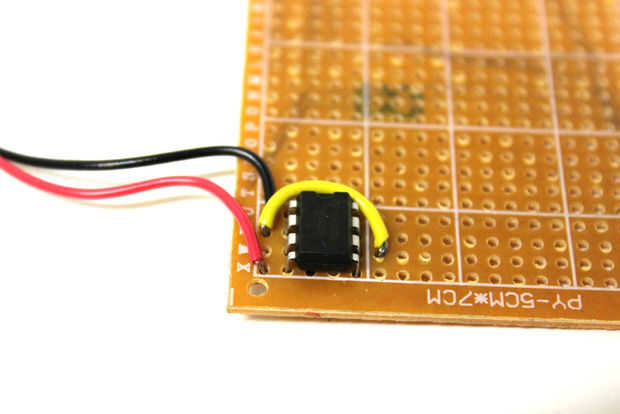
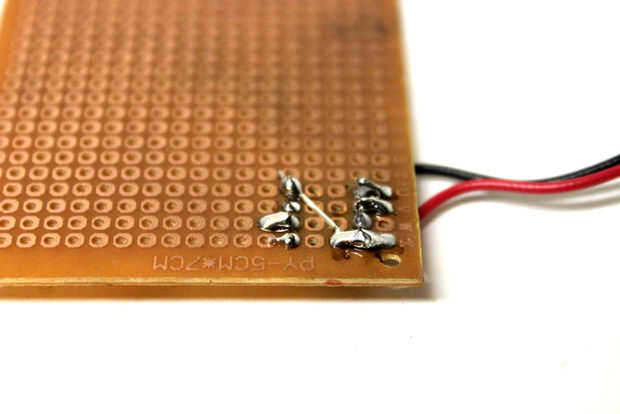
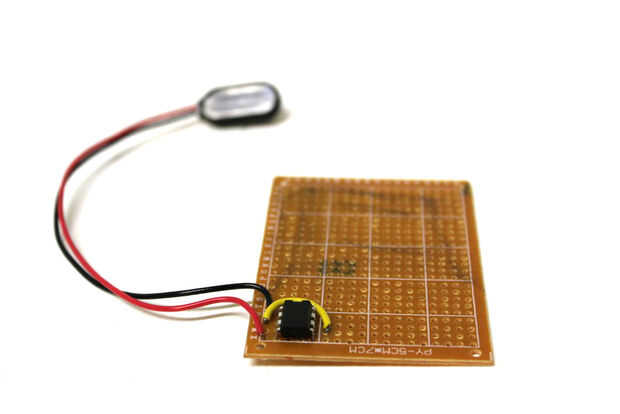
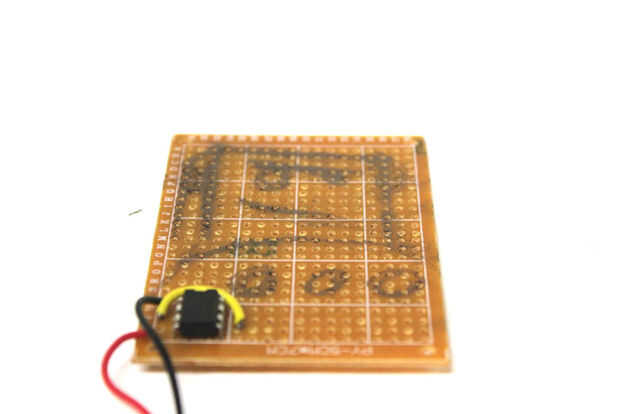
Como se ve en el esquema, hay algunas conexiones "inter-555" a hacer. Hay que conectar el pin 4 a pin 8 y pin 2 a pin 6. Usando un cable de metal viejo, conectado pin 2 al pin 6 en la parte inferior de la perfboard (para hacer las cosas que menos tiempo). Pin 4 a pin 8, corté un pequeño alambre trenzado para hacer la conexión en la parte superior de la Junta. Antes de mover hacia el siguiente paso, asegúrese de que su dibujo del robot es bien definido y oscuro ya que vamos a añadir algunos componentes al robot en el siguiente paso!







")





