Paso 1: Plan de ataque!
Tiempo del taller era uno del mayor reto para mí, ya que solo tengo 1 hora y 30 minutos para una presentación, montaje electrónico, subir el código, conjunto de hardware, prueba de la unidad de control. También tenía que asegurarse de que mi presentación no demasiado porque quiero que cada equipo tiene la mayor parte de su tiempo a ser "la mano en el proyecto".
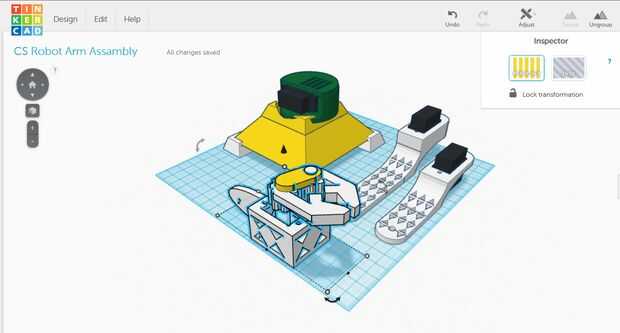
El cuadro en la introducción habla del tamaño de la audiencia ese día, 5 kits CSRA con listo servo instalado para el taller. Diseño cada una de las partes para que pudieran hardware de la Asamblea antes del taller, sálvanos algún tiempo. Mi principal objetivo para el taller estaba mostrando a los estudiantes lo importante de la instrucción siguiente, subir la posición de la CSRA para el paso final de la Asamblea, conectan todos los componentes.
Reconozco que este es uno de los problemas más comunes en el campo de la robótico. Cualquier tipo de robot puede nombrar, cuadrúpedo, humanoides, etc. sólo puede funcionar eficientemente si se homing el su inicio posición correctamente, y brazo de robot no es diferente. No "homing" su proyecto de robótica correctamente podría causar un efecto dominó para más tarde realizar el proyecto y provocar la disminución significativa en la vida útil del robot.
A cualquier fabricantes que quieren a estas piezas de impresión 3D y construcción uno para su propia mesa de trabajo, voy a publicar paso a paso cómo conjunto de todos estos componentes. La mayoría de estas piezas son fricción montada, sin embargo, todavía he indico hold para que atornille en 2 de los tornillos servo.


")










