Paso 5: Montaje Final. "Homing"
Si usted tomó mi Consejo y "hogar" su servo al principio ahora sería su dolor. Tenemos que conectar los servos al microcontrolador, cargar el código de la CSA con el homePos() Comentario.
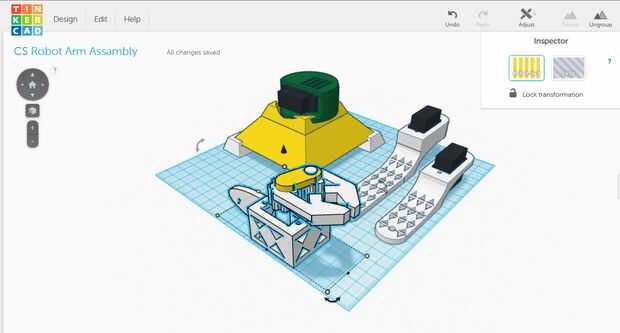
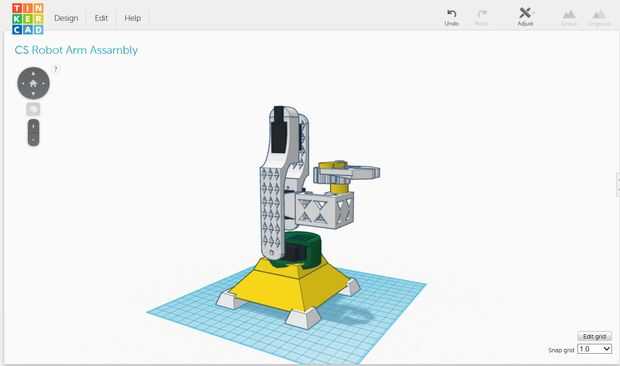
Lo primero que notará la id de que la base de la rotación no se centraba, que quiere decir que tenga que deshacer la base y rehacer que la primera Asamblea de prueba con el conector de servo en el microcontrolador. De este modo el brazo robot enfrentará a la dirección correcta.
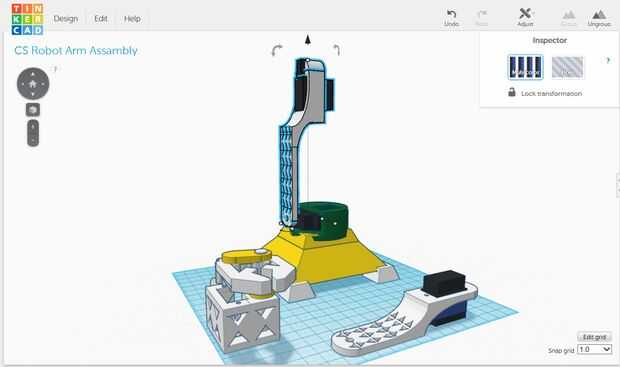
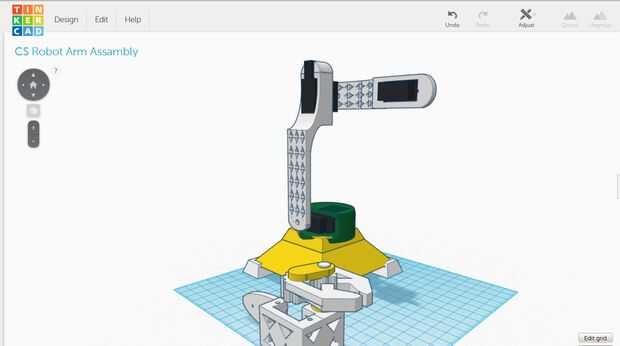
Después de cargar el código homePos en el Arduino y todos conectar los servos, conectando toda la parte Oriente del mismo modo como la imagen y el tornillo en el tornillo del servo a todo en lugar seguro.
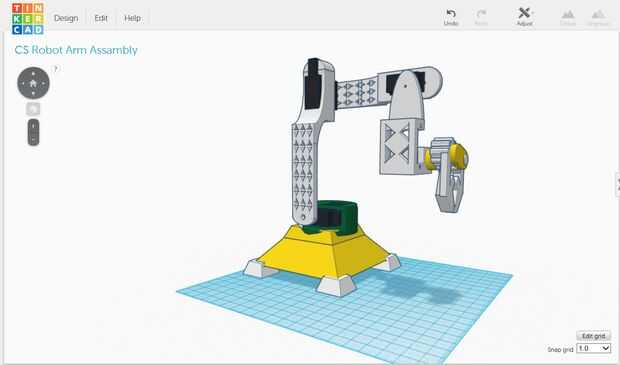
Enhorabuena, estás hecho con montaje básico y codificación. Habrá parte 2 donde explico más sobre la unidad de control, fuente de batería y cinemática inversa. Sin embargo, el código de fuente tengo proporcionan tienes el algoritmo cinemática inversa y el algoritmo de PotControl, no dude en jugar con él.
Si usted tiene cualquier pregunta, por favor deje en la caja de comentario abajo y contestaré en cuanto pueda. Gracias.


")










