Paso 10: Montaje del controlador de vuelo, PDB, receptor y conectar todo.



Herramientas
- Allen Key
- #1 destornillador Phillips
- Cuchillo de la manía
- Cuchillas laterales
Consumibles
- 3M cinta de doble palo
- ataduras de cremallera pequeño
- 3mm separadores/tuercas/tornillos (no incluidos)
- Tira de velcro para asegurar la batería (valores por lado)
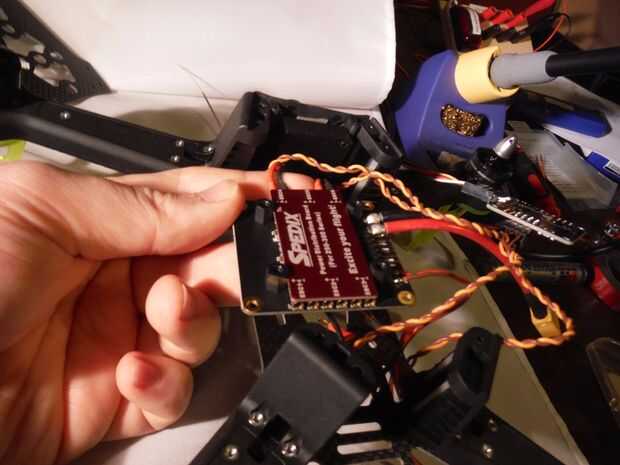
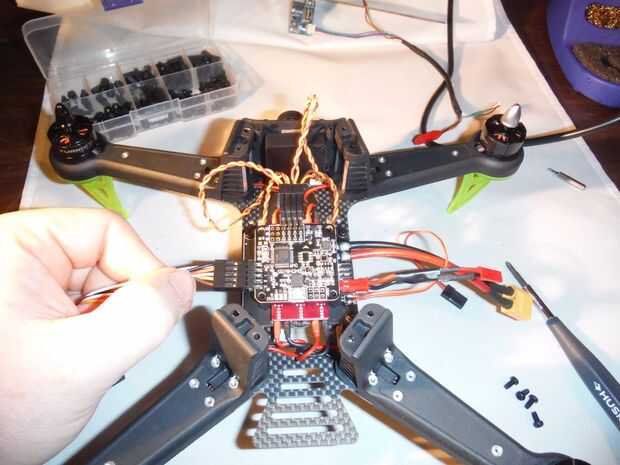
Ahora es el momento para probar ajuste todo. Como el vuelo controlador es mucho más pequeño entonces el tablero de distribución de energía. Necesitaba montar 4 separadores a la BDB en la posición más interna. En este momento decidí usar el lado del disipador de calor para que el cableado viene hacia el lado derecho. Sin embargo una cosa que note es que el cable de alimentación de 5v para el receptor debe enrutarse hacia fuera la parte posterior de la AP antes de montar en su lugar.
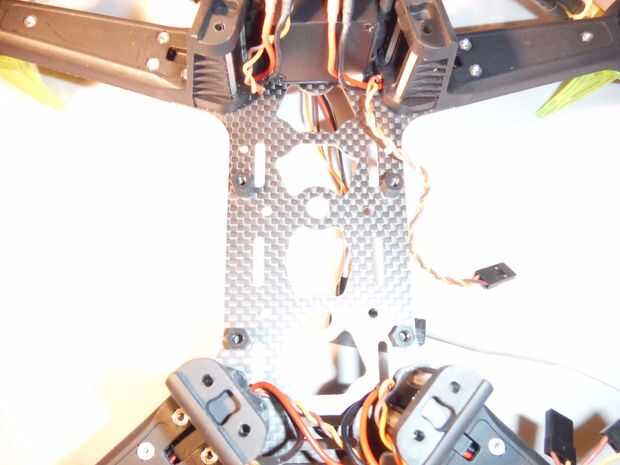
Antes de montar todo a la placa inferior me tomé este tiempo para enhebrar una tira de velcro por las ranuras de la la placa inferior para asegurar la batería.
Lo cool es que la AP no le importa lo que esc es en lo que puerto así que os adjunto sólo el positivo y negativo a los zócalos más cercano a esos brazos. Entonces enrutar los cables de señal para ESC 1 y 3 en el PDB manteniéndolos en sus lados respectivos antes de enchufarlos en el controlador de vuelo. Recuerde que 1 Motor/ESC es la trasera derecha en este patio y en la posición más a la derecha en el controlador de vuelo de NAZE32. Lo importante a recordar con el ESC es ese marrón = tierra - Conecte el adaptador de alimentación a los pines de la batería en el PDB antes de montar el Naze32 como puede ser difícil leer la polaridad una vez el controlador se atornilla en su lugar.
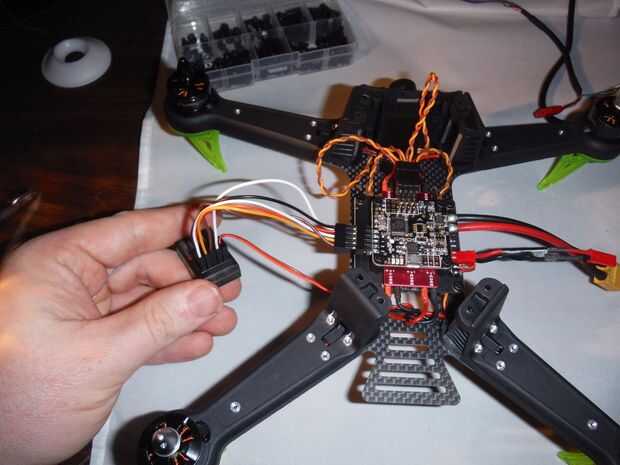
Para facilitar la conexión al receptor (como es un arnés en el lado del controlador) conectado el conector triple - + y 1 en el canal 1 del receptor de la señal. luego 2-4 en orden dejando canal 5 Abra para la energía. El controlador de vuelo recibirá su poder a través de los rieles en el receptor. Ver la anotación en la imagen para mayor claridad.
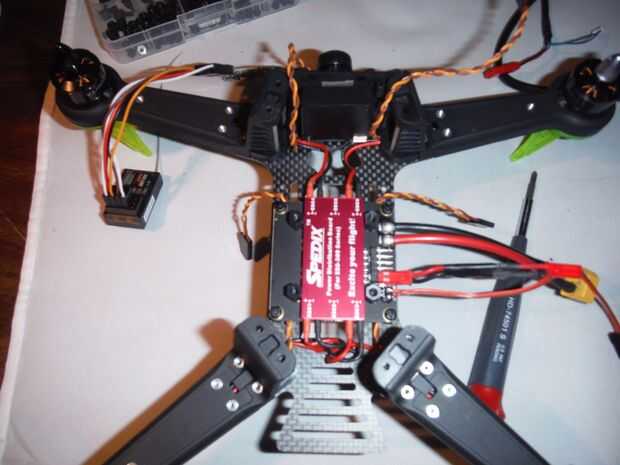
Después envían los cables de señal y receptor de cable de potencia bajo el tablero de distribución de energía. Asegurado en su lugar con 4 tornillos de nylon que vinieron en mi surtido de enfrentamiento (no incluido). Luego montado el controlador de vuelo de Naze32 con la flecha de referencia / conexiones de salida hacia adelante (hacia la cámara). Aseguró el receptor a la cola de castor, con más de 3M de cinta, manteniendo el que todo el cableado cerca de la parte interior y limpio como sea posible.
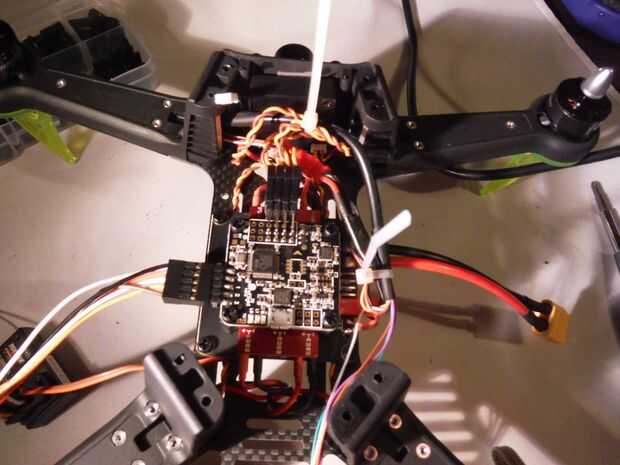
En este momento tienes que conectar la cámara y el TX de video a sus arneses de cableado y alimentación. es más fácil gestionar el paquete mientras la placa superior está apagado. Si dejaste la antena TX video roscada por el orificio en la parte posterior derecha de la placa superior notarás que el arnés de cableado esté alineado frente a frente en el lado derecho. Y que la tensión de las 2 placas es suficiente para mantenerlo en su lugar.
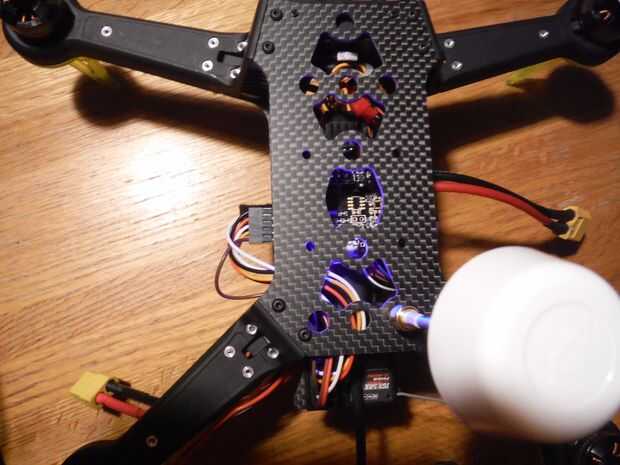
Coloque la placa superior a los brazos de motor usando los 8 tornillos. Uso 2 #0 phillips tornillos para asegurar la parte superior de la mampara delantera.













