Paso 6: Leer y guardar las poses
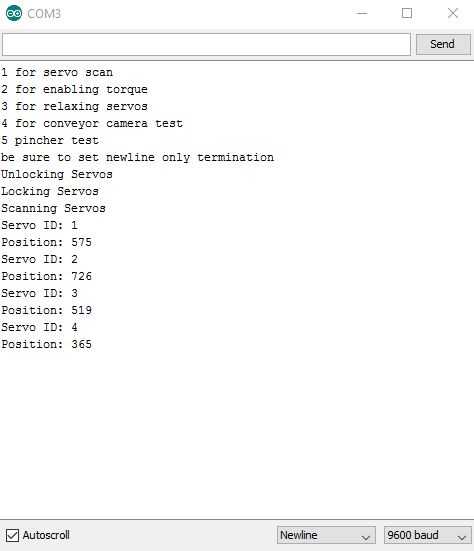
Después de ejecutar el programa de positionreader, haga clic en el icono de ampliación en la parte superior derecha para abrir el monitor serie.
Aquí tienes varias opciones de donde usted puede probar y comprobar.
Podrá relajarse los servos y luego moverlo manualmente para ponerlo en la posición deseada. Entonces usted par los servos otra vez y luego puede medir las posiciones de los motores. TH
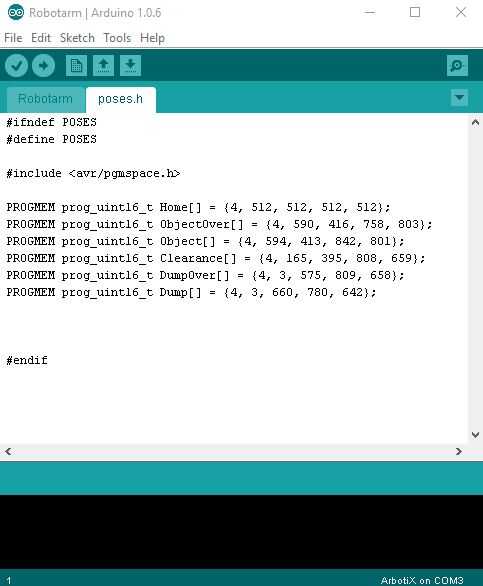
Los datos de todas las poses se incluyen en el archivo poses.h, que está dentro de la carpeta robotarm.
Las poses son las siguientes:
Inicio = la posición por defecto, hacia arriba por defecto
ObjectOver = brazo asomando por encima del objeto antes de que agarra
Objeto = brazo alrededor del objeto, puede tomar en esta posición
Separación = una pose adicional irá a evitar obstrucciones en el camino
DumpOver = asomando por encima del punto de descarga
Descarga = a lugar de dumping, lanzará en esta posición










")


