Paso 3: Firmware Grbl
Grbl inicial está utilizando conductor fácil para controlar motores paso a paso. El controlador de fácil uso 2 pins para controlar el motor, uno de los pines de control la dirección y el otro para el paso.
Para implementar el controlador de Adafruit tuve que reescribir el control del motor y los archivos de control de movimiento, rehacer los algoritmos de línea y arco. También rehecho el interruptor de límite funciona así que ahora el software sabe qué carrera se presiona y tira el error exacto. El firmware se puede configurar para trabajar con carrera o sin ellos.
En el nivel de Gcode agregué algunas otras funciones de M:
M100 - ir a cero mecánico - la máquina mueve cada eje hasta que golpeó el mecánico posición cero (min de carrera)
M101 - ir a cero mecánico sin eje Z - lo mismo con M100 pero no se mueve el eje de z, porque a veces la herramienta sobre el eje z no está montada exacto en el min de carrera por lo que no quiere golpear la placa de trabajo con la herramienta.
M102-ir a la posición de estacionamiento: P - esto mover su eje a uno de los extremos para que la máquina puede ser fácilmente almacenada, esta función necesita ser modificado según su diseño, se puede encontrar en el archivo stepper_control.cpp.
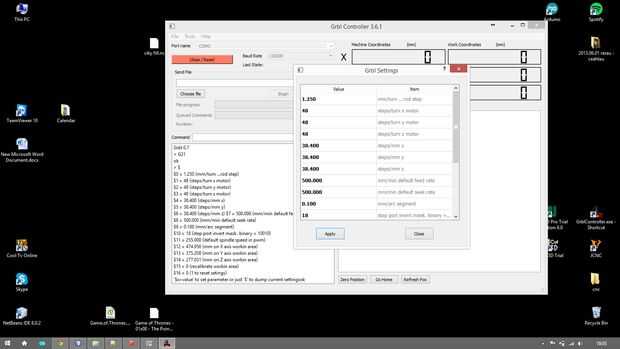
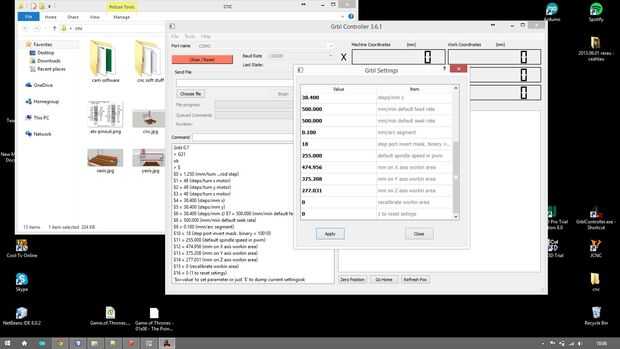
También se renovarán los ajustes de modo que puede establecer cada motor el número de pasos/rev, los pasos de varilla roscada, el ratio de morosidad de la alimentación, la longitud de segmentos de arco y un montón de materias y también una función de calibrar que va desde una carrera a otra, en cada eje, cuenta los pasos y calcular el área exacta de trabajo entonces almacenar en eeprom.
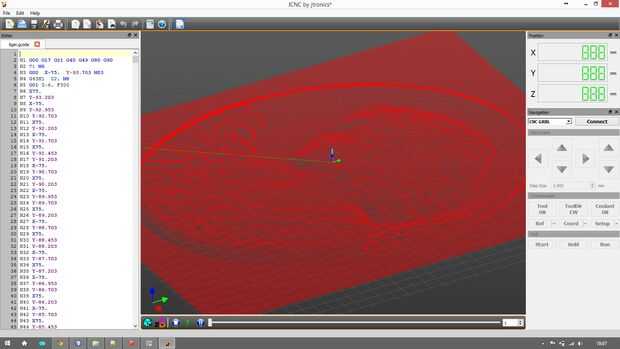
Como remitente de código g se puede utilizar sobre cualquier remitente, utilizo el controlador Grbl, se puede encontrar en GitHub aquí, pero es un poco lento así que lo uso para la ventana de configuración y control manual y para el envío de más grande gcodes utilizo JCNC, lo encontrarás aquí, es una herramienta fresca, puede editar el código de g , puede previsualizar la imagen y también reproducir una animación, tiene control manual pero no tiene una línea de comandos.
Generador de Gcode, o software de cam:
2,5 D usar caballete por Inventables, es una herramienta de navegador gratuito que le permite cargar un archivo vectorial (svg o lo que sea) o crear un diseño y normalmente se debe conectar a un Carver (cnc producido por Inventables) pero también puede exportar el código g por ir a la ficha de máquina avanzada.
Para 3D de fresado 3D Vectric Cut, no es gratis, creo que es de unos 300$, pero es super cool.
Se implemento una opción en ajustes para configurar si se utiliza el interruptor de límite o no porque ahora sólo se define en el fichero config.h
Os adjunto dos archivos 7zip, uno de ellos tiene dentro de un archivo .ino así sólo puede abrirlo con arduino y otros que contienen un proyecto de NetBeans y solo tienes que renombrar el archivo grbl_"Adafruit_motor_driverV2.ino.cpp" demasiado "grbl_Adafruit_motor_driverV2.ino"
Si tienes cualquier sugerencia sobre cómo mejorar o si usted quiere mejorar de su uno mismo por favor compartir.
editar
Actualización: Añadido carrera activar y liberar después de mover a la configuración así que no necesita modificar el archivo de configuración, pero la definición de número de pin es en config.




")








