Paso 3: circuito
Todos los componentes están montados en un proto-escudo de arduino.
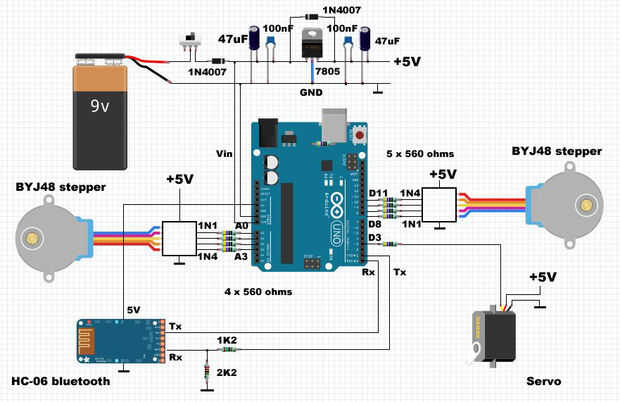
Los steppers BJY48 están conectados a los pines de arduino A0... A3 y D8... D11
El motor servo de elevación de la pluma es conectado al pin D3 que ha sido programado para la salida de 1 ms (milisegundo) y 2mS pulsos 20mS a intervalos.
Los servomotores y motores paso a paso se alimentan de su propia fuente de alimentación de 5 voltios 1 amp.
El módulo de bluetooth HC-06 se alimenta del arduino.
El arduino es alimentado a través del pin Vin.
Con la excepción del módulo de bluetooth HC-06, que cuenta con un divisor de tensión compuesto por resistores de 1 K 2 y 2 K 2 ohm para dejar caer la bluetooth RX entrada tensión de 3.3 voltios, resistencias todas son 560 ohmios. El propósito de los resistores de 560 ohm es ofrecer protección a arduino. También hacen más fácil para el protector del alambre.


")









