Paso 2: cableado
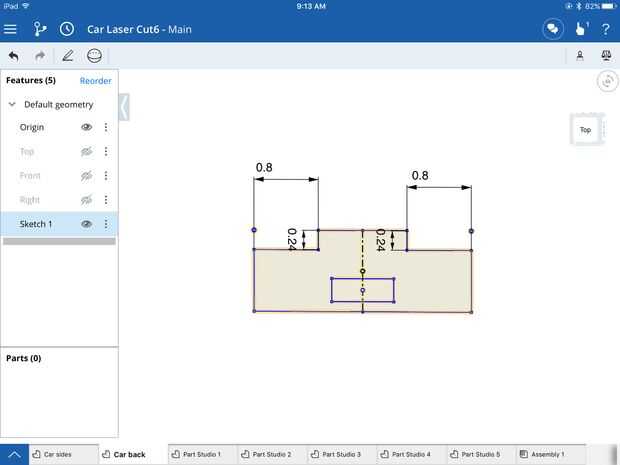
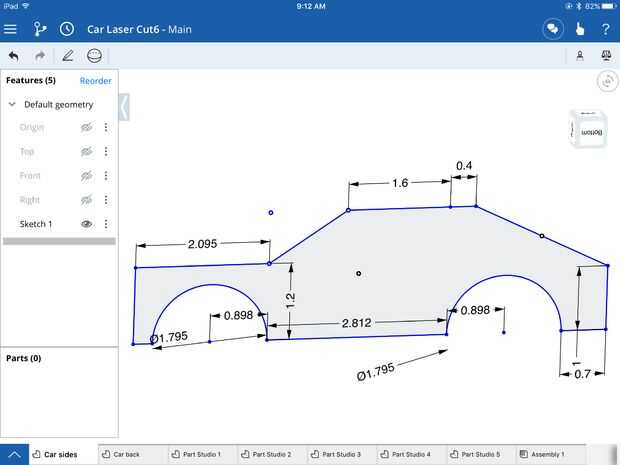
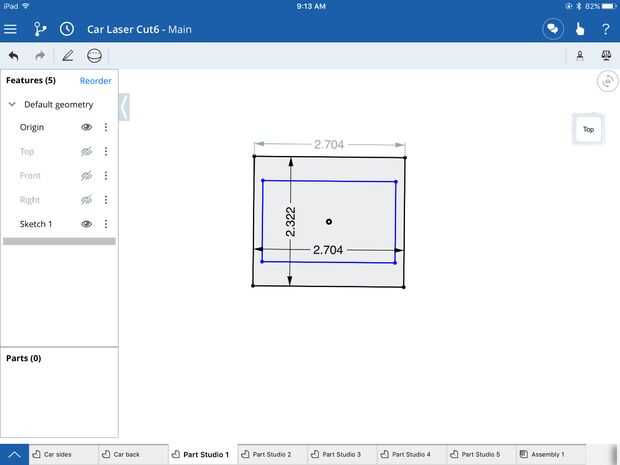
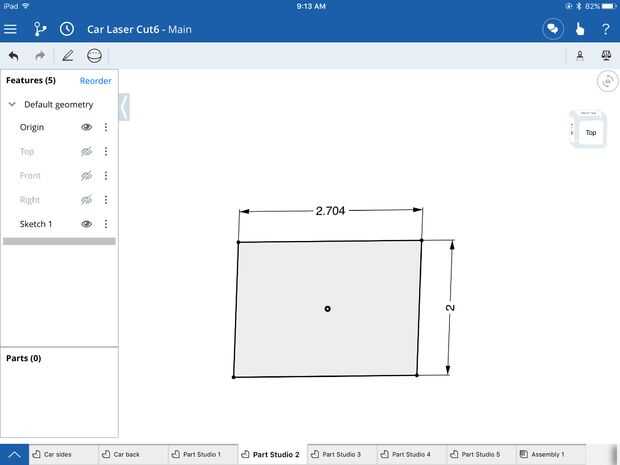
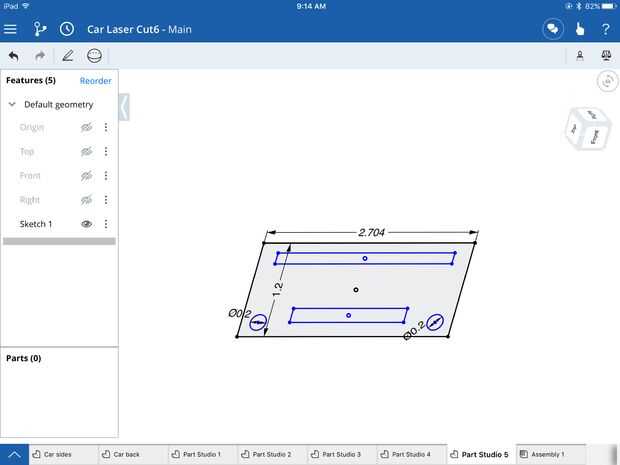
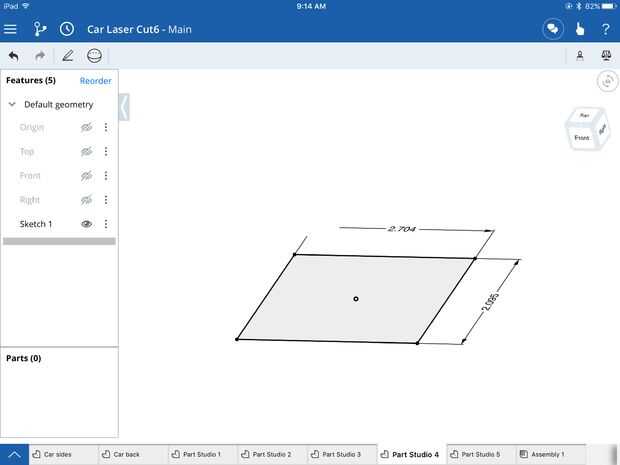
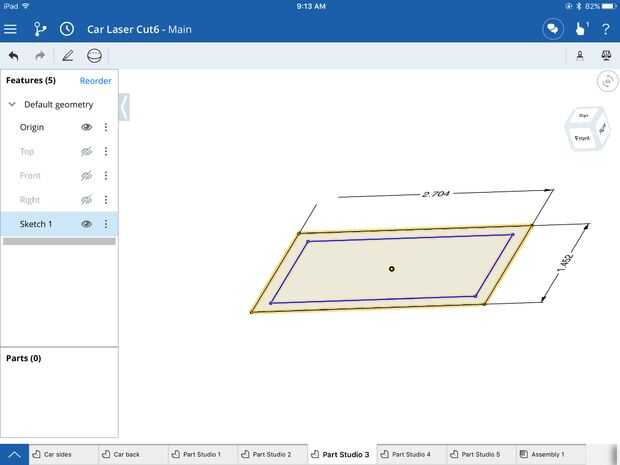
Antes de entrar en los mecanismos de cableado, utilice el cuadro de onshape para seguir las dimensiones y el laser cortó el coche. Por otra parte, en el inicio de su coche de control remoto bluetooth controlados, montar las piezas de madera de abedul respectivos para crear un coche de madera (véase la introducción para el diseño del coche).
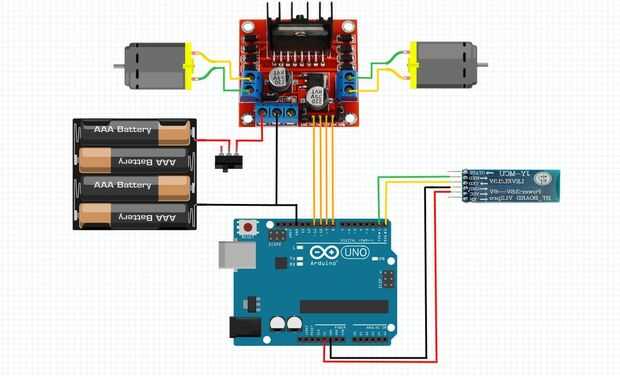
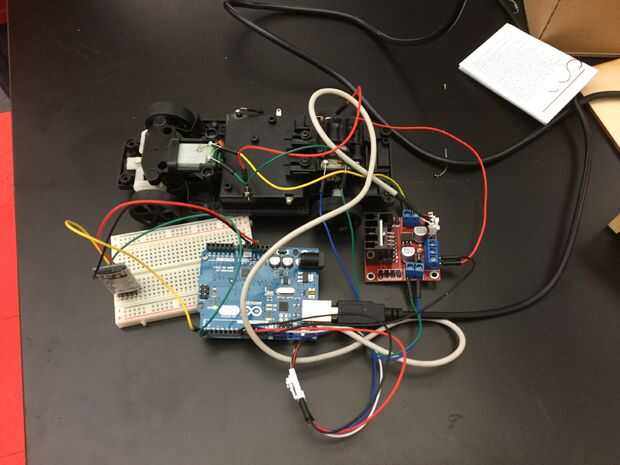
Por encima hay un contorno áspero de la posición de los cables. En primer lugar, conecte el módulo de Bluetooth a la placa en posición un 1234 en el protoboard pequeño. A continuación, conectar los cables de puente al punto específico en la placa (verde para RXD, amarillo a TXD, negro a GND, rojo a VCC).
Por otra parte, pilas 3 doble A la toma de vacíela. Por otra parte, para conectar los cables restantes que miren la imagen. Si tiene problemas al conectar, soldar los dos hilos entre sí y establecería una conexión. Los cables terminados se une por encima de
El código es aquí:
#include #include int bluetoothTx = 1; int bluetoothRx = 0; SoftwareSerial bluetooth (bluetoothTx, bluetoothRx); int Motor1A = 8; int Motor1B = 9; int Motor2A = 10; int Motor2B = 11; void setup() {bluetooth.begin(115200); bluetooth.print("$$$"); delay(100); bluetooth.println("U,9600,N"); bluetooth.begin(9600); pinMode (Motor1A, salida); pinMode (Motor1B, salida); pinMode (Motor2A, salida); pinMode (Motor2B, salida); digitalWrite (Motor1A, bajo); digitalWrite (Motor1B, bajo); digitalWrite (Motor2A, bajo); digitalWrite (Motor2B, LOW);} int flag1 = -1; int flag2 = -1; void loop() {if(bluetooth.available()) {char toSend = (char)bluetooth.read(); si (toSend == de ') {flag1 = 0; flag2 = 0 digitalWrite (Motor1A, bajo); analogWrite (Motor1B, LOW); digitalWrite (Motor2A, LOW); analogWrite (Motor2B, LOW);} si (toSend == 'F' || toSend == 'G' || toSend == 'I') {si (flag1! = 1) {flag1 = 1; digitalWrite (Motor1A, alto); analogWrite (Motor1B, 50);}} si (toSend == 'B' || toSend == 'H' || toSend == 'J') {si (flag1! = 2) {flag1 = 2; digitalWrite (Motor1B, alto); analogWrite (Motor1A 50); {}} Si (toSend == 'L' || toSend == 'G' || toSend == 'H') {si (flag2! = 1) {flag2 = 1; digitalWrite (Motor2B, alto); analogWrite (Motor2A, 50);}} else if (toSend == 'R' || toSend == 'I' || toSend == 'J') {si (flag2! = 2) {flag2 = 2; digitalWrite (Motor2A, alto); analogWrite (Motor2B, 50);}} else {si (flag2! = 3) {flag2 = 3; digitalWrite (Motor2A, LOW); analogWrite (Motor2B, LOW);}}} }









")



