Paso 3: GPS

Aquí estoy usando el uno intel a mí, como parte del concurso. Es un chip de SIM28 con una antena en breakout Junta que Grove vende (http://www.seeedstudio.com/depot/grove-gps-p-959.html?cPath=144_145). Lo bueno es que hay una pieza de upm para este chip. Lo que no es tan agradable (en el momento de escribir esto) es que ese código no funciona (aquí está el ejemplo de código relevante: https://github.com/intel-iot-devkit/upm/blob/2f1b... y el hilo del Foro de soporte relevantes: https://github.com/intel-iot-devkit/upm/blob/2f1b... (con mi ineficiente arreglo temporal)).
En el lado afortunado de las cosas este pequeño chip hace todo el disco duro GPS levantamiento para su y las sentencias NMEA en formato de texto sobre una conexión serial UART. Todo lo que tienes que hacer es analizarlos.
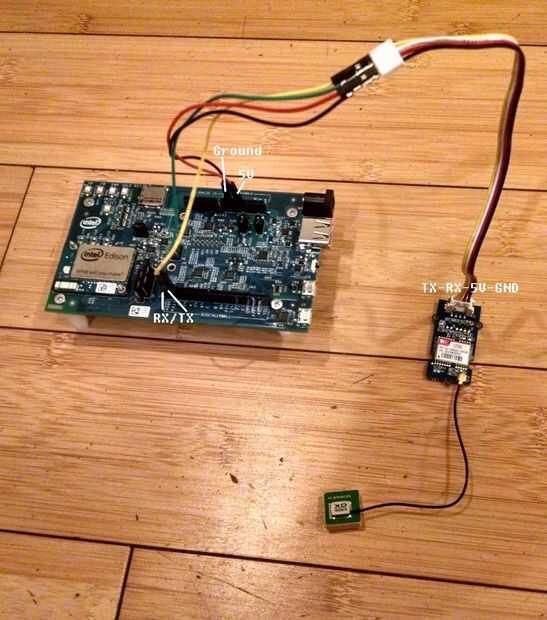
Como se puede ver en las fotos de arriba la configuración de hardware para esto es bastante sencilla. Corriente a corriente, tierra a tierra, rx tx y tx al rx (sí lees que derecho, cruzarlos para que todo lo que transmite el dispositivo gps recibe en el pin de recepción de la edison y un viceversa).
También muestro aquí cómo Conecte los sensores de grove usando el cable de conexión (ya que el kit del concurso no tiene el escudo de grove y no pedir uno porque no habría venido a tiempo). Aquí está el código que tengo análisis que:
Algunos todos en este departamento son
- Cambio de la velocidad en baudios de 9600 por defecto a algo mayor. Probablemente obtendrá más respuestas más rápidas, especialmente con la forma ineficiente estoy recibiendo datos.
- Cambiar al uso de upm una vez actualización (hay varios hilos sobre esto en los foros de intel y parece algo sensibles sobre el tema).
- Configurar el SIM28 a la salida solamente algunas de la NMEA de las oraciones que debe también acelerar las cosas. La primera y la última en esta lista pueden realizarse por sumergirse en la documentación aquí: http://www.seeedstudio.com/wiki/images/d/d7/SIMCo... .
")
")
)")

")

")

")




