Paso 1: El control remoto
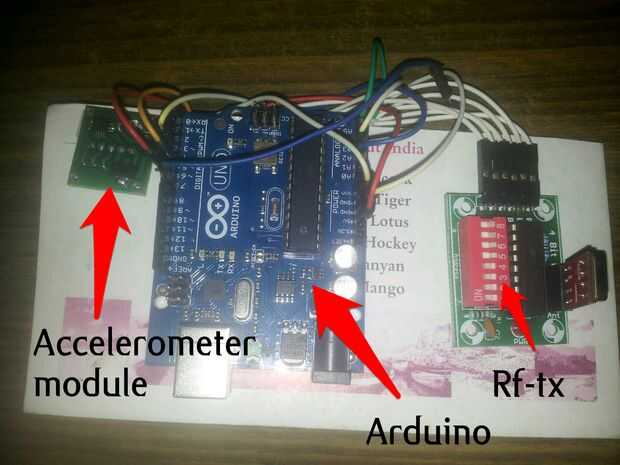
1. RF Tx y Rx
2. módulo de acelerómetro
3. Arduino uno
4. cables de puente
5. Ardunio usb cable
Estoy usando una tarjeta de codificador junto con la Tx RF, es decir, la Junta de HT-12E .
Conectar el módulo acelerómetro
X---Pin analógico---A1
Y---Pin analógico---A2
Todos los Gnds y Vcc deben ser corta por separado.
No necesitando el eje z como estoy tratando de utilizar el módulo para replicar las acciones de un verdadero estilo de conducción.
Así que si,
El tablero de adelante de la curva el coche mueve hacia adelante.
La inclinación izquierda / derecha el coche mueve a Izquierda/derecha.
La Junta hacia atrás del coche de la curva paradas de.
Tan en ese sentido que tenemos que primero obtener las lecturas del módulo en varios puntos de activación para que podemos mover el coche por lo tanto cuando un punto gatillo se ha visto afectado.
Primero ejecutar sólo el módulo en el Arduino y anote que las lecturas de las distintas posiciones de inclinación.
(código de la prueba de la acc en el archivo de descarga)
Asegúrese de que u colocar algunos sorta placa todos los componentes para que sus acciones pueden ser interpretadas fácilmente.
Para mí tengo los valores de disparo
Adelante---x = xxx y > = 400
Parada---x = xxx y < = 300
Izquierda---x < = 300 y = xxx
Derecho---x > = 380 y = xxx
'xxx' significa no ' cuidado porque esos valores no activa en las direcciones que estamos buscando.
Una vez que tienes todos estos información
Seguir y conectar el módulo de acelerómetro y el Tx RF a la Arduino a los pines indicados a continuación
Acelerometro Modlue
x---A1
y---A2
Junta de tx RF
B0---7
B1---6
B2---5
B3---4
Todos los Gnds y Vcc deben ser corta por separado.
Coloque todos los componentes en el mismo tablero.
Conectar el Arduino al ordenador y volcar el código de Arduino.
(Acc-Rf-Tx código en el archivo de descarga)
Hay que ir, ahora tienes la lista remota.
SIGUIENTE PASO!!!

")





")





