Paso 8: Coche propio ajuste de sistema de posición mediante cámara Web
-Leer la línea en el piso usando cámara Web.
-Convertir a las coordenadas en la pantalla de la cámara a las coordenadas reales.
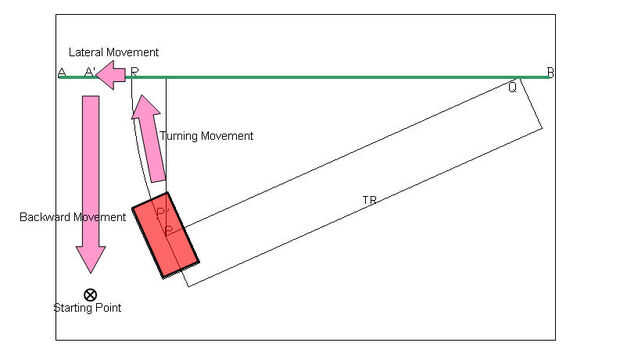
-Calcular la dirección y la posición del coche.
-Hacia el punto de partida.
WebCamera_HDProWebcamC910_CN05.xls
Utilizando el siguiente código de procesamiento, medida el real X, coordenadas Y y coordenadas de Webcam y hacer una fórmula de conversión.
Código de procesamiento
WebcamPointIndicator.pde
En primer lugar, compruebe cámara solamente.
Código de procesamiento
Chocolate01_CN05.PDE
A continuación, Compruebe la combinación de cámara y 4 Arduinos.
Código de procesamiento
Chocolate02_CN05.PDE
")
")











")