Paso 3: Mesa de relación entre el valor de servo de dirección y radio de giro

Código de Arduino
SWSVSC_A.PDE
Ejecutar el adjunto código de procesamiento.
Código de procesamiento
TurningRadius_P.pde
Medida de un radio de giro con respecto a un valor de servo dirección.
Base de la rueda del original M-03R es 210 mm. radio de giro de aprox. 200mm R/C coche está ahora disponible.
Cambiar un valor de servo dirección pulsando las teclas de flecha 'correcto' o 'izquierda' y vuelva a medir un radio de giro relativo.
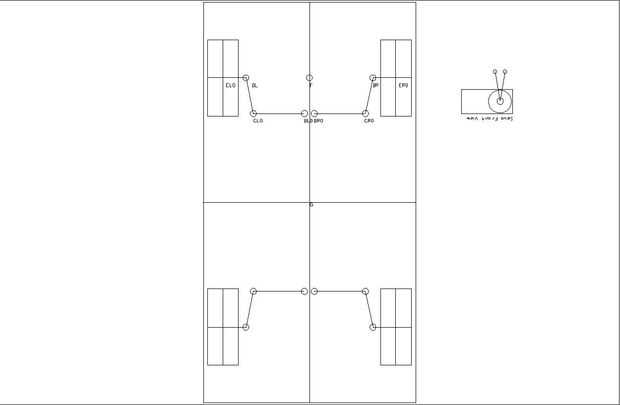
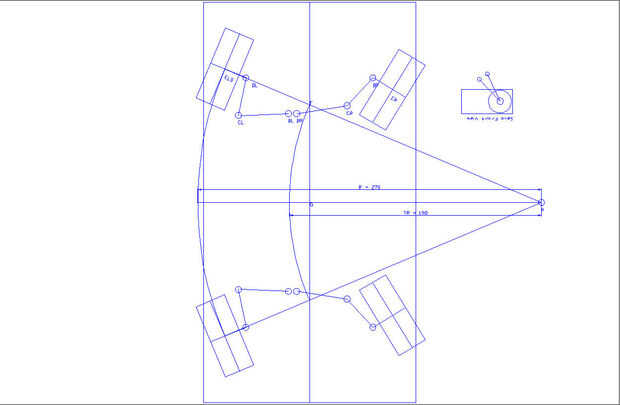
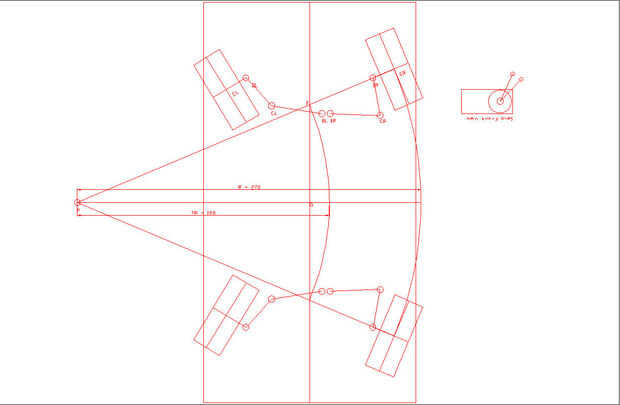
La hoja Excel adjunta muestra una relación entre el valor de servo de dirección y radio de giro. (Consulte la hoja de cálculo "TR" y "Fig1, 2, 3" hojas de trabajo para coche plan dibujos y A, B, C, D, E, F, G puntos.)
Esta hoja ya se ajusta en función del resultado de medición.
(ZBR0 y ZBL0 se ajustan para cumplir con el resultado de medición tanto como sea posible).
Luego, realizar la tabla de relación entre steval (valor de servo de dirección) y R, TR (radio de giro).
La tabla está en la hoja de trabajo de 'Mesa'.
")
")









