Paso 8: Coche propio ajuste de sistema de posición mediante cámara Web
Sistema de ajuste de posición propia coche se compone de 4 partes;
-Leer la línea en el piso usando cámara Web.
-Convertir a las coordenadas en la pantalla de la cámara a las coordenadas reales.
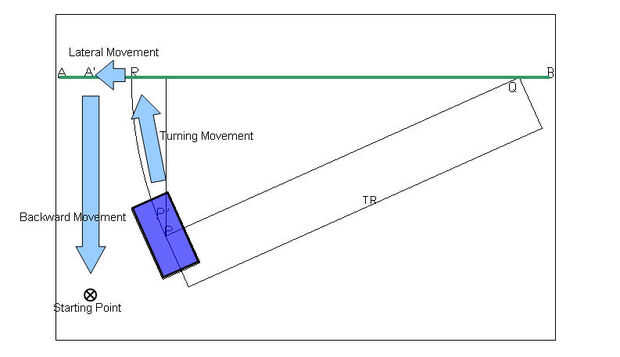
-Calcular la dirección y la posición del coche.
-Hacia el punto de partida.
(Vea adjunta archivo Excel "WebCamera_HDProWebcamC910.xls").
Utilizando el adjunto código de procesamiento, medida el real X, Y coordenadas y coordenadas Webcam y hacen una fórmula de conversión.
Código de procesamiento
WebcamPointIndicator.pde
En primer lugar, compruebe cámara solamente.
Código de procesamiento
Chocolate01_CN06.PDE
Video: Coche propio ajuste de sistema de posición mediante cámara Web
Nota:
Grabé la línea de cámaras Web en archivos ogg, pero no puede ser visto en YouTube.
A continuación, Compruebe la combinación de cámara y 4 Arduinos.
Código de procesamiento
Chocolate02_CN06.PDE
/ * Definiciones de estilo * / tabla. MsoNormalTable {mso-estilo-nombre: 標準の表; mso-tstyle-rowband-tamaño: 0; mso-tstyle-colband-tamaño: 0; mso-estilo-noshow:yes; mso-estilo-parent: ""; mso-padding-alt: 0 mm 5.4pt 0 mm 5.4pt; mso-para-margen: 0 mm; mso-para-margen-abajo: .0001pt; mso-paginación: viuda-huérfano; fuente-tamaño: 10.0pt; font-family: "Times New Roman"; mso-fareast-font-family: "Times New Roman"; mso-ansi-language: #0400; mso-fareast-language: #0400; mso-bidi-language: #0400;}
Este video muestra Coche propio ajuste de posición de la línea de lectura para mover hacia atrás al punto de indicación".
Nota:
Establecerá la conexión VNC entre coche Top PC y otros PC. Deben ir los anteriores códigos de procesamiento de PC del coche superior a través de otro PC con VNC.
(Opere la PC del coche arriba de otra manera en vez de VNC. Pero no es relevante para la conducción automática programada. Yo puedo revelar la próxima vez cómo operar sin VNC.)
")

")

")
")







