Paso 3: NAZA-M v2
NAZA M es un controlador de vuelo para el quadcopter (hasta octacopter) que puede seguir waypoints GPS.
Se obtiene de los cuatro canales de la Rx y convierte las señales en cuatro señales de salida para los motores de cuatro de lo quadcopter. En que la conversión suma y resta mucha información para contrarrestar a los movimientos no deseados de su aeronave. Al mismo tiempo hacer que asume que el controlador se encuentra en un avión que puede inclinar y girar alrededor de su propio eje en tres dimensiones habitación.
Obviamente las cosas correr un poco diferentes en un coche.
Además de estar en una sala de dimensiones 2 (la calle) en lugar de 3 dimensiones, un coche tiene cierta mecánica del movimiento mientras que da vuelta, con un radio dedicado, dependiendo del ángulo de las ruedas.
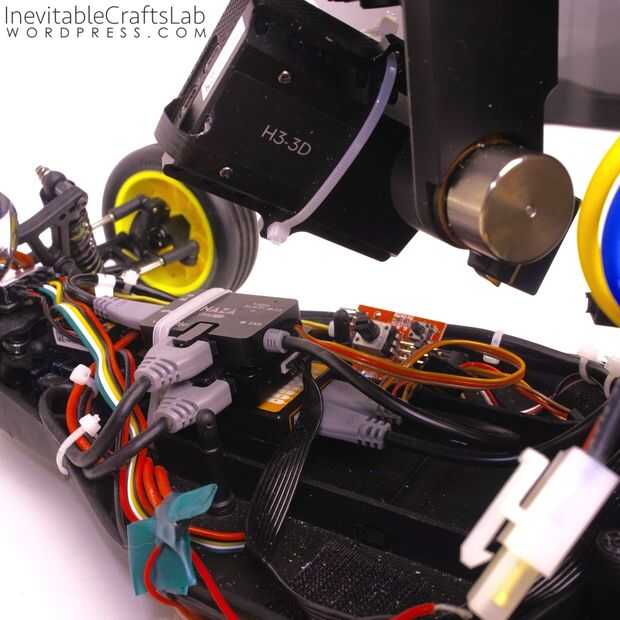
La buena noticia es, que el controlador NAZA funciona independiente, sin necesidad de cualquier startup u otras señales de servo funcione correctamente. Ha incluso mejor que eso: el controlador NAZA algunas de la señal del timón avanza al cardán en la Zenmuse, que significa el cardán se convierte «"en la vuelta en vez de tratar de contrarrestar y girando hacia el exterior en las curvas.
He hecho el cable de servo de split, que alimenta la entrada de timón NAZA y el servo dirección del coche.
El controlador NAZA viene con una unidad GPS que está mejor montada de todo motor.
He atado todos los cuadros de DJI juntos y colocados entonces en la superficie solamente el coche tiene.
DJI dice para asegurarse de que Obtén suficiente aire para mantenerse fresco, hasta el momento permanecían frescos incluso cuando atado juntos.












")
