Paso 5: El Arduino interfaz escudo
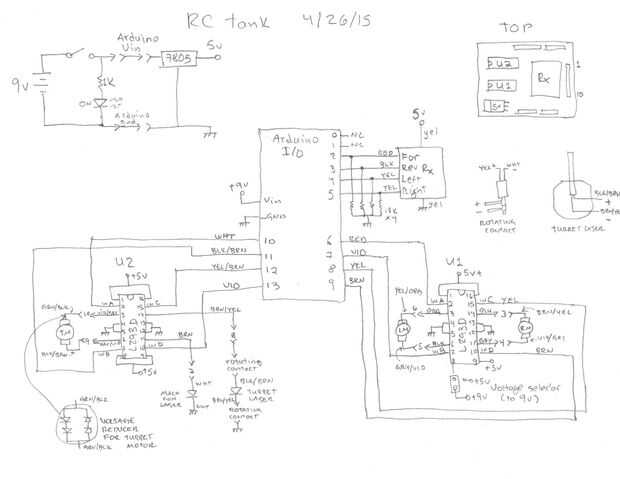
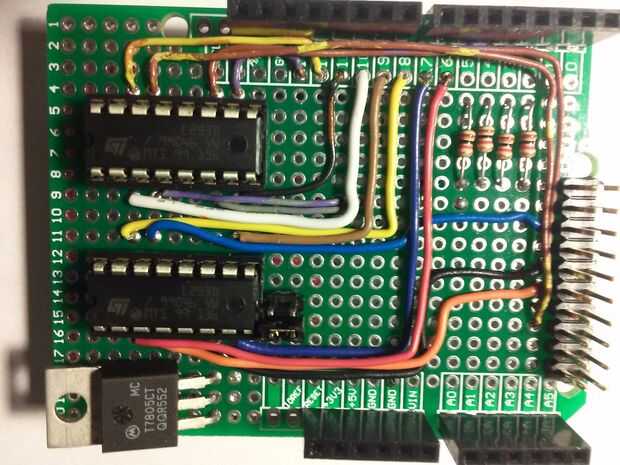
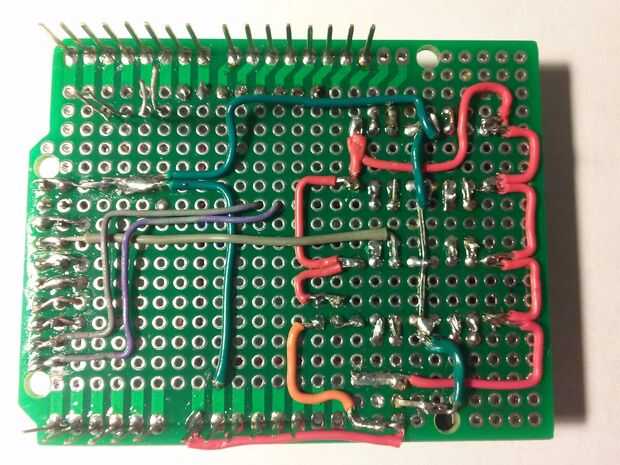
Darse cuenta de lo engorroso es utilizar transistores discretos para hacer control de motor H-puentes, decidí usar el (ahora sé) chip L293D doble puente H IC popular. Toma las señales de entrada V 5 pero salidas de señales V 9 (en este caso). Decidí usar una batería de 9 (más adelante 2 baterías, para proporcionar potencia/tiempo de batería adicional) para la potencia del motor y un regulador de V 5 para las señales de entrada Rx. Basado en la velocidad del motor torreta, decidido a la potencia de su motor con 5 V en vez de 9 V para permitir la rotación más lenta y más preciso control de torreta para apuntar y disparar el cañón. Que a intentado hacer el tanque de RC fácil de solucionar, modular y fácil de montar y desmontar. Así que hice todas las conexiones de fácil conexión/desconexión mediante encabezados de conectores, jumpers y cinta aislante dejando real de soldadura como última opción. Así que construí mi primer escudo Arduino DIY y cableados todos los hardware del tanque. El tablero de la Rx necesita un resistor de pull-down para cada una de sus señales de control. Uno de los L293Ds (U1 en el esquema) controla los motores de la pista. Uno (U2) controla el motor de la torreta en su lado izquierdo, y, aprovechando sus capacidades de configuración, utilicé la mitad del puente derecho para controlar el cañón láser y la otra mitad para el control de la Ametralladora láser. He utilizado todo de digital del Arduino / O de excepción Tx/Rx los pines de Arduino 0 y 1 (y las entradas analógicas). Más tarde descubrió que el motor de la torreta se giren demasiado rápido, así que añadido dos diodos en cada dirección para caer el voltaje del motor de 5 V a unos 3.6, sentí que la velocidad llegué a ese nivel de tensión era mejor.






")


")



