Paso 7: teoría de la
Teoría de la
Todos los cálculos se realizan en la aplicación de Android y calcular inmediatamente el 2‹2‹of de valores el PWM para el motor izquierdo y derecho. Aplicación tiene una configuración flexible, como la gama de lo PWM, la sensibilidad de inclinación, el umbral mínimo para el PWM y otro. Comandos de ejemplo transmitidos por Bluetooth:
L-255\rR-120\r
L - el comando para el motor izquierdo, R - por el derecho
Un guión significa que la rotación del motor para moverse
255 - PWM (para Arduino es la velocidad máxima de rotación) del valor
\r - final del comando.
En este mando de comandos coche se mueve hacia adelante y ligeramente girado a la derecha, como el motor derecho gira lentamente a la izquierda.
L255\rR-255\r
En este comando el motor izquierdo girará hacia atrás y hacia adelante a la derecha, forzando un coche gire alrededor de su eje hacia la izquierda.
H1\r
Comando es un canal adicional al que se puede conectar por ejemplo etc. sonido, luces.
Símbolos de comandos L, R y H se pueden definir en la configuración de aplicaciones de Android.
En el MCU programa de control proporciona un temporizador que apaga el motor si el último comando recibió más de n segundos atrás. Los datos se almacenan en la memoria EEPROM del controlador y del dispositivo Android se pueden cambiar. La gama de este ajuste es de 0,1 segundos a 99,9 segundos. Esta opción puede deshabilitarse. Trabajar con EEPROM proporciona comandos: Fr - lectura de valores 2‹2‹and Fw - valores de registros.
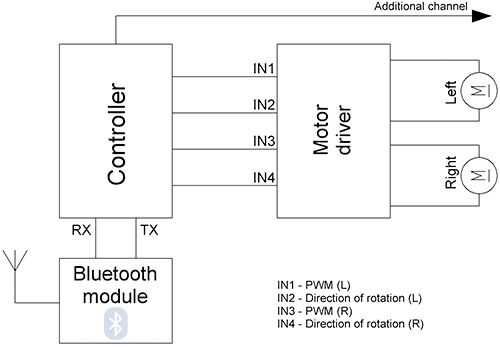
Electrónica
Diagrama de bloques ver en foto de arriba




")





")


