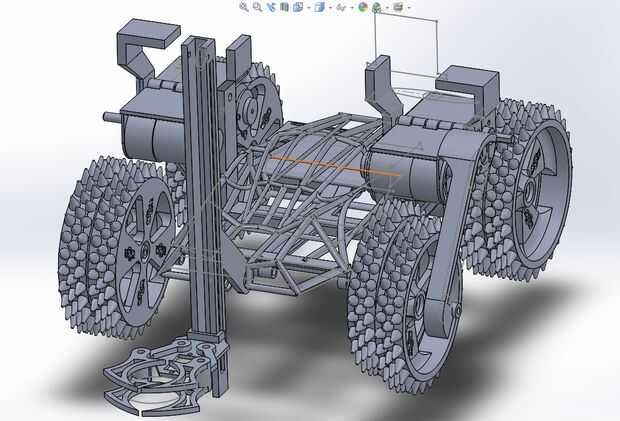

Hemos creado un robot para una competencia de robótica del colegio. La competencia fue controlar remotamente un robot que podría recoger una pelota de golf, maniobra de un curso que incluye puentes apretadas vueltas y una pista de pendiente de 30 grados. Al final de la carrera de obstáculos hay dos plataformas que fueron la caída de bola de golf fuera de las zonas. Uno en 4 pulgadas el otro a 10 pulgadas (más puntos a la mayor caída apagado). Después de la entrega había un 'sprint muerto' contado por momento que era un multiplicador de punto. También, las limitaciones de robots implicó tener que abarcan menos de un 1 pie cúbico de volumen y también permite controlar a distancia por lo menos 50 millas de distancia. Optamos por utilizar un Raspberry Pi con motores Pololu. Necesitábamos un coche que no sea demasiado pesado, tiene un bajo centro de masa y tienen una baja velocidad alto esfuerzo de torsión todas las ruedas para la carrera de obstáculos sino también un escenario alternativo de alta velocidad para la carrera cronometrada al final. Así que... nos 3D impreso un coche robot de doble tren de la impulsión.
Modelo de todos los archivos de CAD mediante Solidworks 2014 x64 edition (archivos SLDPRT). Todas las piezas fueron impresas en un general Solidoodle 4 con sobre todo filamento plástico PLA y algunos software ABS utiliza Host Repetier rebanar. Equipo de VEX usado para el sistema de cadena y el piñón y sistema de cadena del elevador de brazo principal.
Por favor, póngase en contacto con si usted tiene alguna pregunta/quieren más modelos de CAD que no tengo ya siempre o tiene más preguntas sobre los componentes eléctricos y codificación. Sin embargo, esto es sobre todo un tutorial para darle un sólido y único diseño mecánico para aprovechar y crear su propio 3D impresionante impreso robot.



")









 con Arduino y Android(bluetooth)")