Paso 3: Garra y sistema de brazo
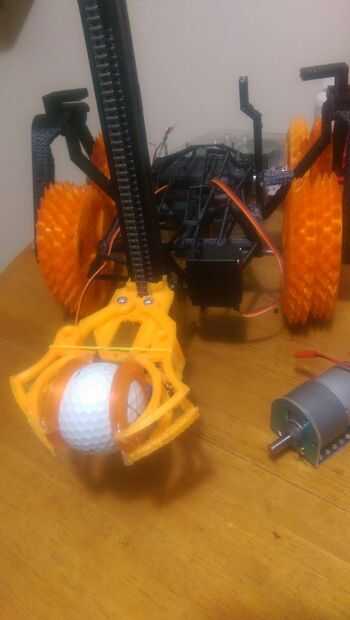

He creado el modelo de brazo principal para encajar perfectamente como un adaptador de brazo del servo. Eso principal debe fijarse en la parte delantera de lo chasis. El brazo es hueco para permitir la cadena VEX funcionando a lo largo con un micro servo sin fronteras rotacionales (enlace proporcionado para cadena) http://www.vexrobotics.com/276-2182.html.
El encaje de plataforma en el brazo (las grietas hechas a lo largo del brazo) y ajuste la plataforma a un eslabón de la cadena en el exterior (yo usé un clavo). Un micro servo encaja dentro de la plataforma y doblar alambre y une las puntas del brazo del servo (doble cara). Básicamente como brazo de servo gira 90 grados, empuja a ambos lados de la uña igual luego cuando servo vuelve a 90 grados. Póngase en contacto con si usted necesita más detalles.



")









 con Arduino y Android(bluetooth)")