Paso 4: Sistema de piñón y cadena

Esta parte era inicialmente difícil de entender y bastante difícil de montar.
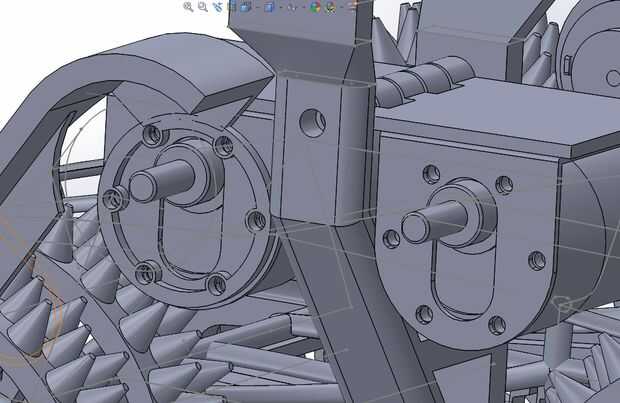
En primer lugar, las piezas de la bisagra están conectadas con el brazal con un perno o tornillo. Motores de alto par se atan y cuelgan debajo de cada uno de ellos. Yo había a jerry rig vex piñón para fijar al eje del motor. Ahora, el archivo 'Brazo juntos' son los brazos de elevación de la rueda exterior. Se adjuntarán a los motores directamente a través de tornillos. En las ruedas, cada rueda exterior tiene un pequeño tornillo extrusión de hacia fuera. En este tornillo otro piñón más pequeño de VEX se une al perno mientras sigue permitiendo el agujero en la punta de los brazos giren libremente con la rueda dentada interior. Finalmente, si usted enrolla la cadena VEX en ambos piñones, el motor, con la rueda dentada unida, debe girar la cadena girando la rueda dentada unida al perno de la rueda. Eso fue doloroso para explicar pero me avisas si necesitas ayuda.
En el archivo de CAD bracer puede ver bocetos de donde el servo debe estar ubicado (boca abajo). Este es su "sistema de disparo alternativo tren de la impulsión". Cable debe fijarse a cada extremo del brazo del servo y los extremos de las piezas de la bisagra. Esto funciona por el servo de giro, el alambre y jalando cada plataforma de bisagra (con motores por debajo de ellos) que se une también a los brazos de exteriores y todo el sistema de cadena y el piñón. Así en efecto, un potente servo gira cada brazo y a rueda igualmente de la tierra y haciendo el momento del aterrizaje las ruedas interiores (eran ligeramente elevados antes).
Enlace a la VEX cadena y el piñón http://www.vexrobotics.com/276-2166.html



")









 con Arduino y Android(bluetooth)")