Paso 2: electrónica
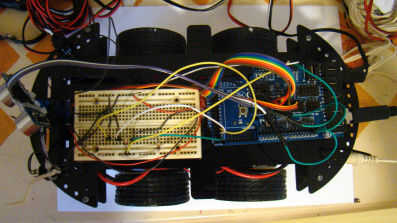
El ultrasonido tiene un 15 grados ángulo de visión, el servomotor se utiliza para ampliar este campo. Sensores de emergencia, como el nombre lo dice, están allí en caso de una emergencia, cuando uno de ellos se activa, el coche va detrás y luego verifica a qué dirección debe ir.
El servomotor se conectó al pin 8 de Arduino
Sensores de emergencia | Arduino
1 = 22
2 = 24
3 = 26
Sensor de ultrasonidos | Arduino
echo = 13
Trig = 12
L298N | Arduino
in1 = 6
in2 = 5
ENA = 7
IN3 = 4
In4 = 3
ENB = 2



")

")







