






La junta fue diseñada para utilizar resistencias 1/4W y los cables se encajan en los agujeros con los pasadores de la resistencia. Sin embargo, desde que tuve poco espacio y algunos rescatados resistores SMD alrededor, terminé los usando y los cables se sueldan en los agujeros de la resistencia.
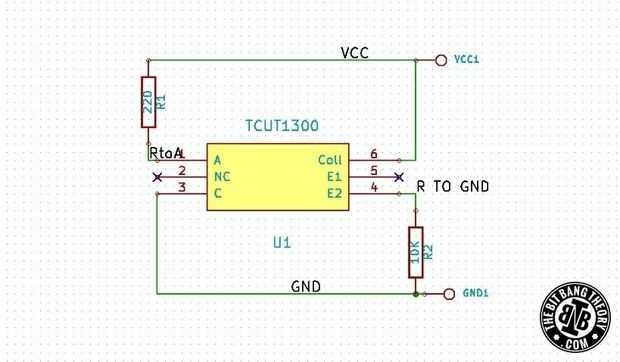
El esquema es muy simple. Sigue el circuito típico de aplicación de la hoja de datos. Utiliza una resistencia de 220 ohm para hacer que una corriente de aproximadamente 0.16mA circula por el LED emisor y una resistencia de 10 K entre transistor de la foto emisor de la salida y tierra. La salida está en la señal R_TO_GND se muestra en el esquema.
Usé mi primer CNC, TheMaker1, ruteado de PCB. TCUT1300 de soldadura no es fácil pero se puede hacer con algo de paciencia y un soldador de punta fina. Para hacerlo más fácil, te aconsejo poner alguna soldadura en el PCB antes de colocar el TCUT1300. Luego, coloque en el tablero y las pistas de la PCB por el lado de calor hasta que se derrita la soldadura debajo del componente.
En el área de fotos podrás ver el PCB montado y el codificador en algunos motores junto con la rueda del codificador.
La rueda del codificador que usé fue generada desde un archivo de postscript que puede ser ajustado para generar la rueda del codificador con las especificaciones que usted desee: diámetro externo, doble de pistas, número de segmentos, diferencia de fase, segmento ancho, diámetro del eje, etc.. Se puede encontrar en Thinginverse aquí , o directamente descargarlo usando este enlace. Utilizar un editor de texto para editar los parámetros que encontrará en las primeras 50 líneas. Son bien comentaron, por lo que deben ser fáciles de entender.
Usted puede descargar los archivos Kicad aquí.
Para más información y mayor calidad de fotos ver el post original aquí: http://www.thebitbangtheory.com/2013/05/tiny-encoders-dc-motors/
Para otros proyectos visitan mi blog: http://www.thebitbangtheory. .com
Este instructivo fue enviado al reto de láser de Epilog. Por favor vote por él! :) Si gano usaré el Zing para cortar y grabar las partes del cuerpo del robot que estoy haciendo :)






")

 con Arduino")




