
Este componente necesita un poco de historia para entender nuestras motivaciones.
En diciembre de 2013 equipo Mojavaton (ahora equipo arena) fue invitado a los ensayos de #DARPADRC. Utilizamos un apagado el servo de plataforma para todos los actuadores. Creemos que hemos diseñado dentro de las especificaciones de los servos. Los dispositivos cuesta alrededor de $500,00 un pedazo. Como un auto financiado por equipo es un componente caro. Durante el día de la práctica de los ensayos tuvimos 3 tales dispositivos mueren de maneras diversas y muchas veces tenía problemas con la calefacción. Si ves el video de nuestro robot en 2013 verá casi una apertura o cierre de una válvula y luego tienes que parar y recoger el robot para salvar a servos de distruction. Porque DARPA equipos realmente entienden los problemas que surgen durante la competición uno de nuestros equipos favoritos (Kairos Autonomi) nos dio, no prestado, servos para mantenernos en los ensayos. Y acelerado de envío en 3 más contáctese con dedos cruzados.
Terquedad y enfoque equivocado
En la final no íbamos a depender de los servos de la misma. Gastamos una gran cantidad de tiempo, 1 año, en un Motor de pasos y la caja de cambios de hipocicloide 99:1 que fue impreso 3D. El diseño como la construcción de la pierna es una cosa de belleza, un tema, la caja de cambios motor paso a paso tiene demasiado alta de pérdida de par. pérdida de 90% del par medido en un prototipo. No es que la caja de cambios es realmente culpable. Nuestro equipo cree que es nuestro entendimiento de la caja de engranajes que falta. Como el líder del equipo tomó completamente demasiado para dar para arriba en el diseño de Motor paso a paso/hipocicloide.
Al enfoque de localizar lo que podría posiblemente trabajo
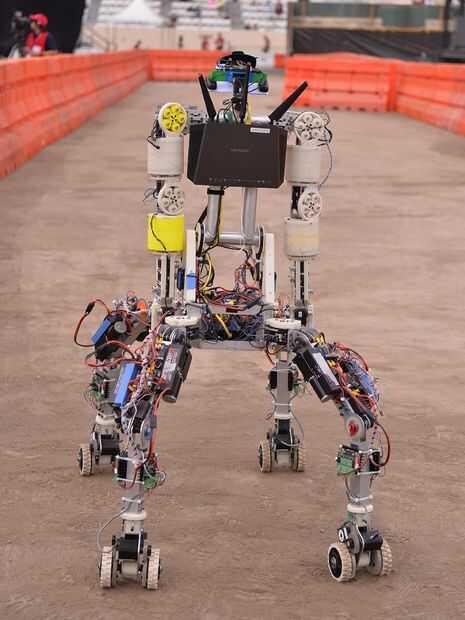
Las piernas que se utilizó en la final fueron diseñadas cerca de 3 semanas antes de las finales. Nuestro ingeniero mecánico también es un mentor de robótica #FRC primera. Así que nos fuimos con lo que él sabía. Lo que construimos fue un motor, engranajes planetarios de 3 10:1 (para la relación de 1000: 1), regulador del motor de Talon, mismo SpectraSymbol Softpot y otra vez un mini Arduino Pro. Mecánica, electrónica, Software End-to-End en 3 semanas, no un mal paso para voluteers y entusiastas. Al final todos los componentes de este "servo" costo $200,00 y pueden ser reparados con repuestos $30,00-$50,00.
Reemplazar una salida eje hexagonal en la final a un costo de $30.00. Una historia totalmente diferente que una reparación de $500,00 por un fallo similar en el antiguo mecanismo de servo.







")

 con espasmos de piernas")



