Paso 4: Construcción de chasis

Siempre me gusta empezar con un chasis rodante para la mayoría de mis robots.
En primer lugar, cortar la placa base acrílico a medida. No tiene que ser exacto solo necesita ser lo suficientemente amplia como para el apoyo de la cámara y el tiempo suficiente para apoyar la batería. Asegúrese de dejar espacio para montar la rueda de la cola también.
Taladrar las ruedas Lego, si esos son el tipo que va a utilizar. Perfore el cubo de las ruedas con un gran suficiente broca que puede caber un tornillo de horn de servo a través del orificio. Mezclar un pequeño lote de epoxy de 2 parte seca lento y pegue los cuernos servo a las ruedas. Seguir adelante y dejar de lado las ruedas por lo que se puede secar durante la noche.
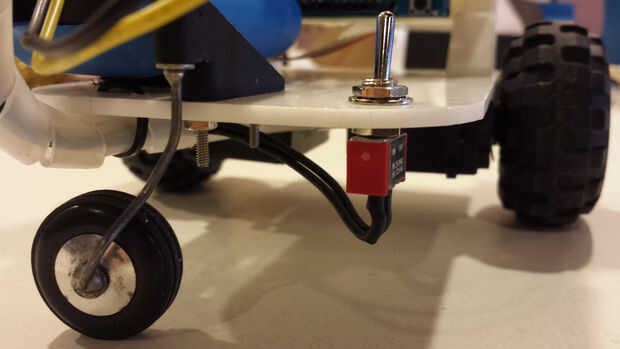
Proceder a la soldadura de la Asamblea de la rueda de cola y asegúrese de que esté a la altura correcta así que cuando se monte, la base debe quedar paralelo a la superficie de la mesa/Banco. A continuación, perfore agujeros a un arreglo la cámara ayuda a la placa base, dejando 3 cm más o menos de la base en la parte delantera. Esto le permitirá montar los sensores de IR en un paso posterior.
También, fije la rueda de la cola de la misma manera a la parte posterior de la placa del chasis. Me envuelve los servos en cinta adhesiva luego ajustaron sobre la placa de base detrás de los tornillos que sujetan el soporte para la cámara en la parte inferior del chasis. Fije las ruedas una vez que hayan secado durante la noche y utilizan un tornillo para asegurar la rueda para el cuerno del servo.



![Coche robot de seguimiento de línea [forma fácil]](https://foto.askix.com/thumb/170x110/8/b7/8b7581cd094d809bd5a615ea2c80d457.jpg "Coche robot de seguimiento de línea [forma fácil]")









